
设计具有完全自主和多任务能力的行走机器人是机器人学的主要研究目标之一。足式机器人与轮式或履带式机器人相比,因具有丰富的步态和冗余的肢体结构,在地形适应性方面有着显著的优势[1-2]。近些年来足式机器人已广泛应用于消防、高层建筑清洗、服务和反恐等领域[3]。采用足式结构和真空吸盘的爬壁机器人因便于在具有复杂表面的幕墙上运动,已吸引一些学者进行研究。韩国成均馆大学研制了采用真空吸盘吸附的四足机器人,并安装了多种传感器,以更好的适应不同的平面环境[4]。孙立宁等[5]开发了一种具有模块化关节的六足爬壁机器人,通过真空吸盘在壁面上快速运动,并应用于反恐领域。在多足机器人中,六足机器人具有冗余的机械结构,灵活的通过能力和超强的负载能力,更适合在非结构环境下作业,近年来已经对相关基础理论进行了深入探索[6-7]。步态规划作为六足机器人基础理论研究的核心内容,为足端轨迹规划和机体运动规划提供理论落足点,决定各足的运动时序,直接影响机器人的整体运动性能[8-9]。目前,应用于六足机器人的步态主要是三足步态、四足步态和波形步态等规则步态。事实上,步态通常表现为生物的一种节律行为,主要由位于脊髓(脊椎动物)或胸腹神经节(无脊椎动物)的中枢模式发生器控制[10]。为提高机器人运动的灵活性,逐渐将动物中枢神经系统的作用机理应用于机器人运动控制。Cohen[11]通过研究七鳃鳗脊髓的解剖结构最早提出了CPG模型。受生物步态控制机理启发,将机器人各足视为神经元,通过近似周期性地触发各足运动实现机器人的行走,提出了基于CPG原理的步态规划方法。与那些复杂的运动学模型相比,基于CPG的控制方法更为简单,因此得到了广泛应用[12-13]。H. Rostro-Gonzalez等[14]提出了基于尖峰神经元的CPG模型,可产生用于六足机器人步行、慢跑和快跑三个不同步态的节律信号。文献[15]中引入混沌控制策略,构建了一个较为简单的神经单元控制模型,生成11个基本的行为模式,实现了自组织多足机器人的复杂行为控制。Weihai Chen等[16]利用一个同步振荡器和几个一阶低通滤波器构建了CPG模型,实现了六足机器人不同步态的之间转换。
基于CPG原理的步态规划方法可在没有传感器反馈的情形下生成稳定步态,结构简单,响应速度快,仍是研究热点。考虑到动物可依靠脑干提供的简单刺激信号即可完成步态间的突变,相应的在非结构环境下,可以通过调节少量参数来实现多种步态的转换。故此,本文重点针对壁面爬行六足机器人,提出一种小冲击足端轨迹规划方法,能够在未知环境下依靠较少的传感器实现多种步态的自主转换,并能够调整机器人重心与幕墙间的距离以增加吸附稳定性,实现机器人在幕墙上自主爬壁和越障。
1 机器人平台设计
根据六足生物的肢体结构和运动特征,并结合机体需具有一定空间用于放置任务设备的要求设计了六足爬壁机器人,由正八边形机体和六条腿组成。六条腿具有相同的结构,呈圆周分布在机体的两侧,增加了腿部转动空间,同时减少腿之间的碰撞,如图1所示。机器人腿部结构如图2所示。每条腿由基节、股节、胫节和吸盘组成,其中胫节上安装了直线弹簧用于吸收冲击。每条腿具有3个自由度,由伺服电机驱动,胫节与吸盘之间通过球铰链接,使吸盘可以吸附在不同倾角的平面上。
为了探测障碍距离,在机体左侧最前方腿L1和右侧最前方腿R1上各安装2个激光测距传感器,其中L1上的2个距离传感器分别用于测量自身与前方障碍及左边障碍的距离,R1上的2个距离传感器分别用于测量自身与前方障碍及右边障碍的距离。机器人自身的姿态依靠1个陀螺仪获得。每条腿上都装有1个位移传感器,测量胫节上弹簧的变形量,进而得出足端受力。所有传感器数据输送到PC中,经分析处理后,控制机器人实现自主运动。
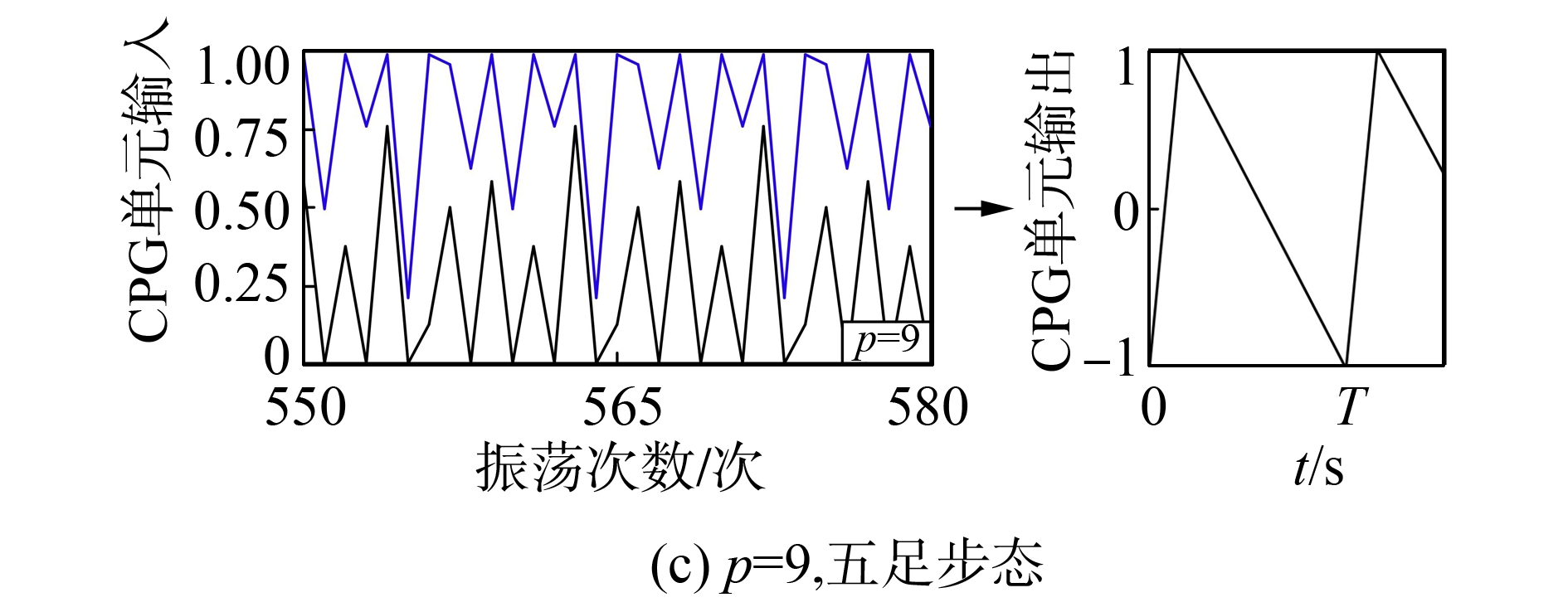
图1 六足机器人构型
Fig.1 The configuration of hexapod robot
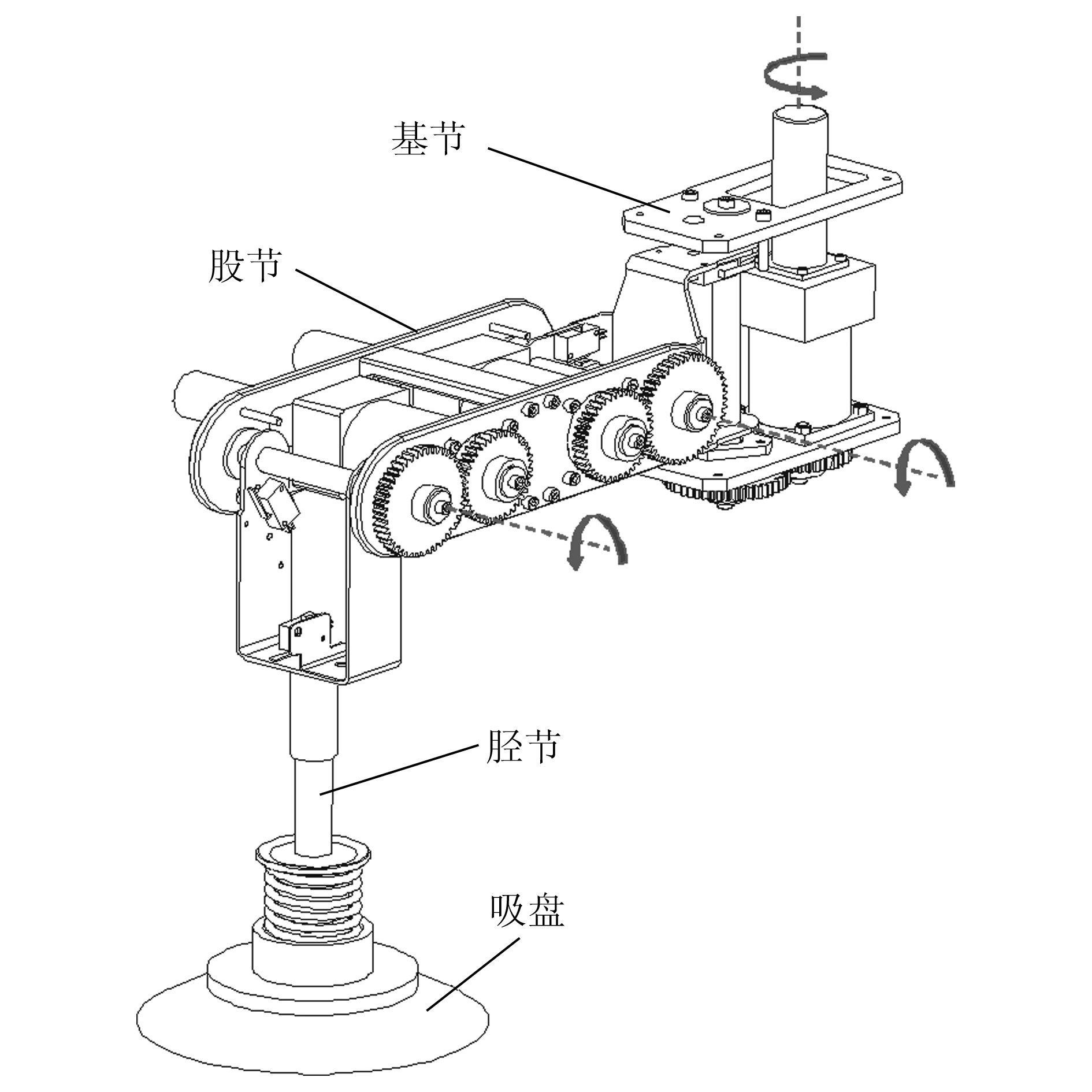
图2 三自由度腿部结构
Fig.2 Configuration of three-DOFs leg
2 运动学建模与足端轨迹规划
2.1 运动学建模
建立六足机器人坐标系,进行运动学建模与分析,确定机体、关节和足端的位置关系,是实现机器人运动规划和驱动控制的前提。
如图3所示,定义ΣO为躯干坐标系,X轴沿横向,Y轴与机器人前进方向一致,Z轴垂直于躯干表面满足右手螺旋法则。机器人左侧3条腿分别用L1、L2、L3表示,右侧3条腿分别用R1、R2、R3表示,ΣOm0(1≤m≤6,m∈Z)为腿部坐标系。图4中,ΣOmi(1≤i≤3,i∈Z)为第m条腿上的第i个关节的坐标系,l1、l2、l3 分别为基节、股节和胫节的长度。根据D-H模型,可求得从ΣOm3到ΣOm0的转换矩阵m0Tm3,足端位置矢量Pm=[pxpypz]T为
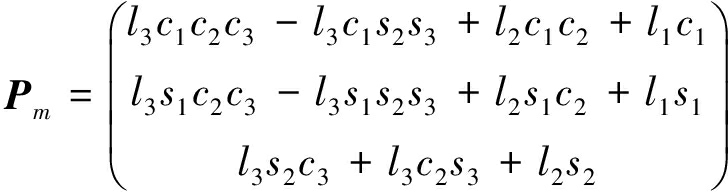
(1)
式中:li为第i个连杆长度,ci=cos θi,si=sin θi,θi为两连杆夹角。
根据式(1),若给定足端位置pm,则逆解为
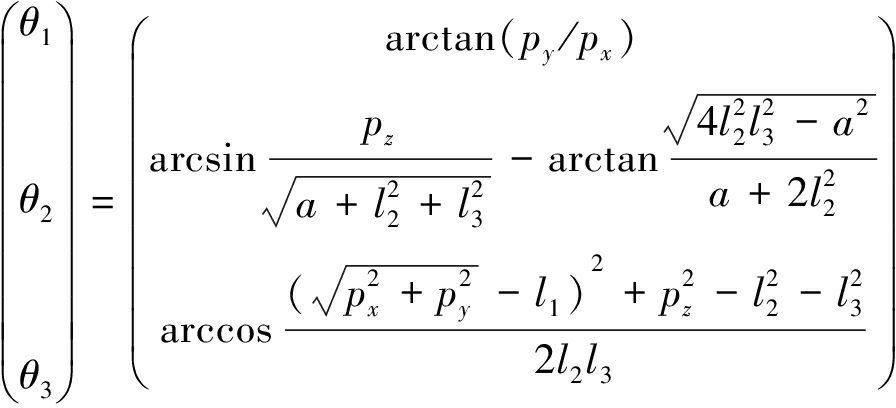
(2)
式中![]() 因此Jacobian矩阵为
因此Jacobian矩阵为
(3)
式中:J11=-s1(l3c23+l2c2+l1),J12=-c1(l3s23+l2s2),J13=-l3c1s23,J21=c1(l3c23+l2c2+l1),J22=-s1(l3s23+l2s2),J23=-l3s1s23,J31=0,J32=l3c23+l2c2,J33=l3c23。
其中,cij=cos(θi+θj),sij=sin(θi+θj)。
由于关节转角θ1、θ2和θ3均为时间变量,因而一系列随时间变化的足端位置形成足端轨迹。因此,关节角速度和角加速度分别为

(4)

(5)
根据运动学分析结果,在给定足端运动轨迹后,即可求得各关节角的运动轨迹。
2.2 足端轨迹规划
六足机器人行走时其足端轨迹需满足对地形和运动稳定性的要求,即轨迹高度可按照障碍高度变化,根据障碍的远近可主动调整步长,越障后能够找到足够的落足区域(不与前足及障碍碰撞),且落地平稳、无冲击。机器人的各种步态是建立在单腿运动的基础上,如图5所示。W为支撑宽度,即足端(px,py,pz)在腿部坐标系ΣOm0下的X轴坐标,运动时为减少足端与躯干两侧障碍的碰撞几率,W取固定值;hmax为足端抬起最大高度,其值随所规划轨迹不同而变化;H为支撑腿足端与腿部坐标系原点Om0间距离在Z轴方向上的投影。足端先从PEP(后极限位置)跨过高度为h的障碍运动到AEP(前极限位置)完成摆动相;然后进入支撑相,足端相对壁面静止,相对于躯干从AEP运动到PEP,完成一个步态周期,回到相对于躯干的初始位置。
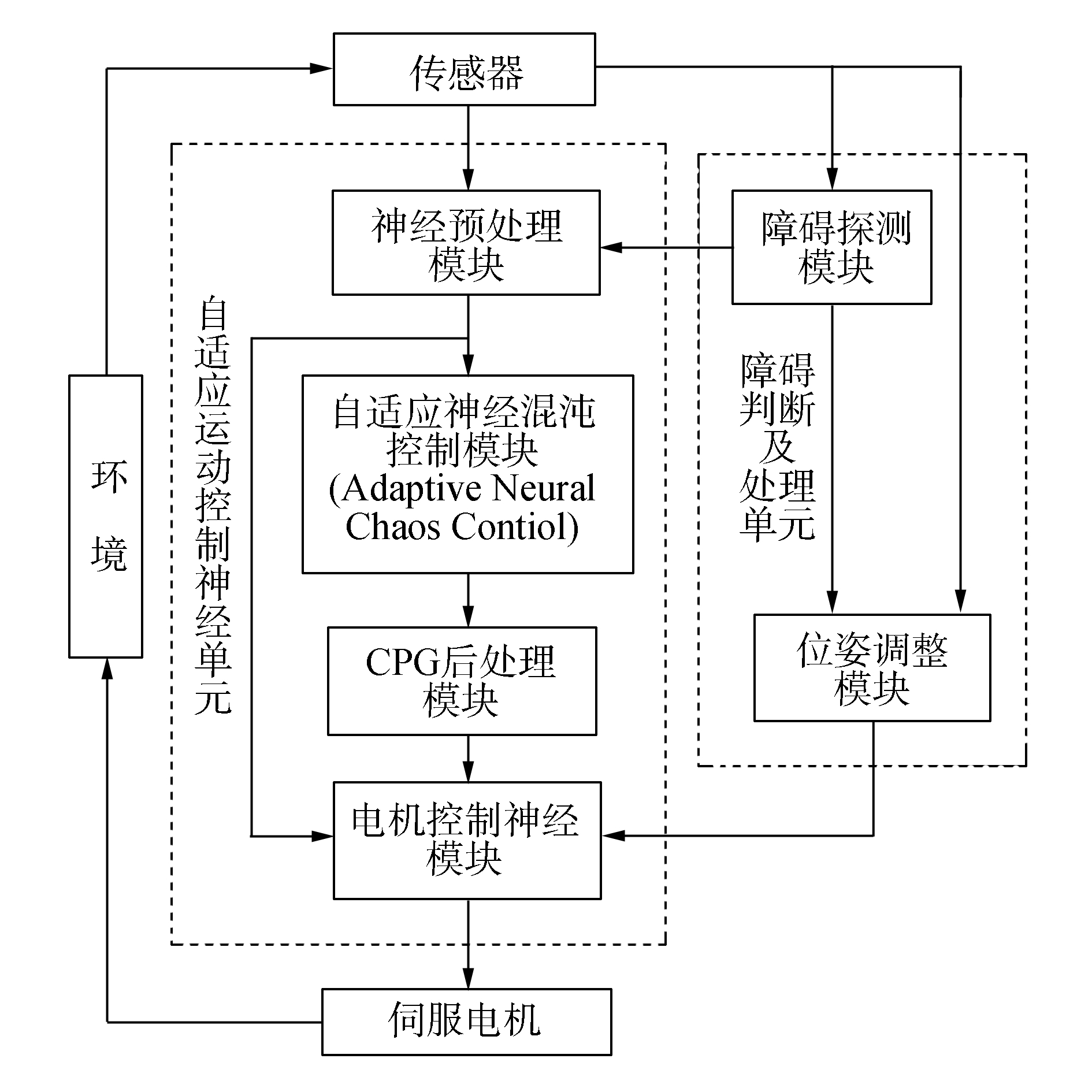
图3 六足机器人坐标系分布
Fig.3 Coordinates of the hexapod robot
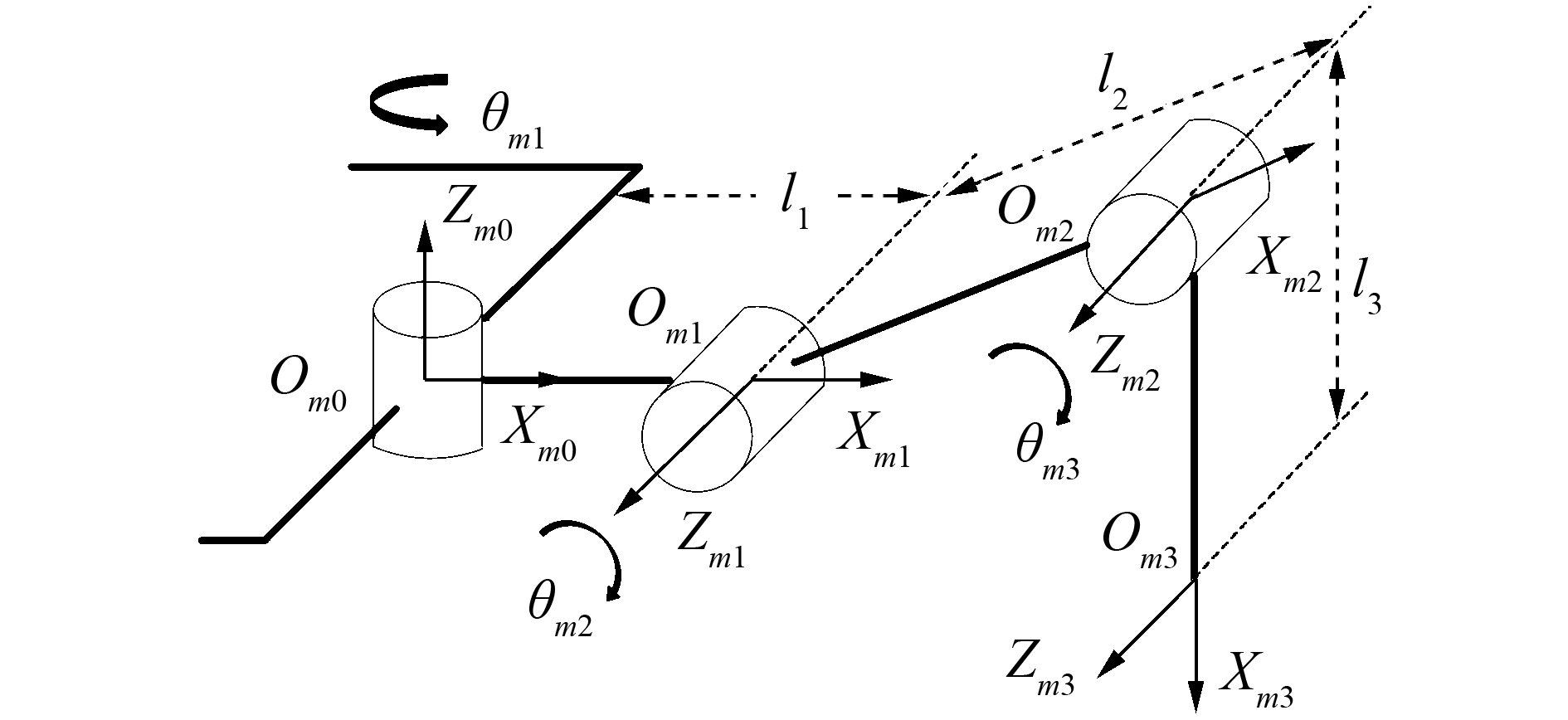
图4 六足机器人腿部坐标系
Fig.4 Coordinates of the hexapod robot leg
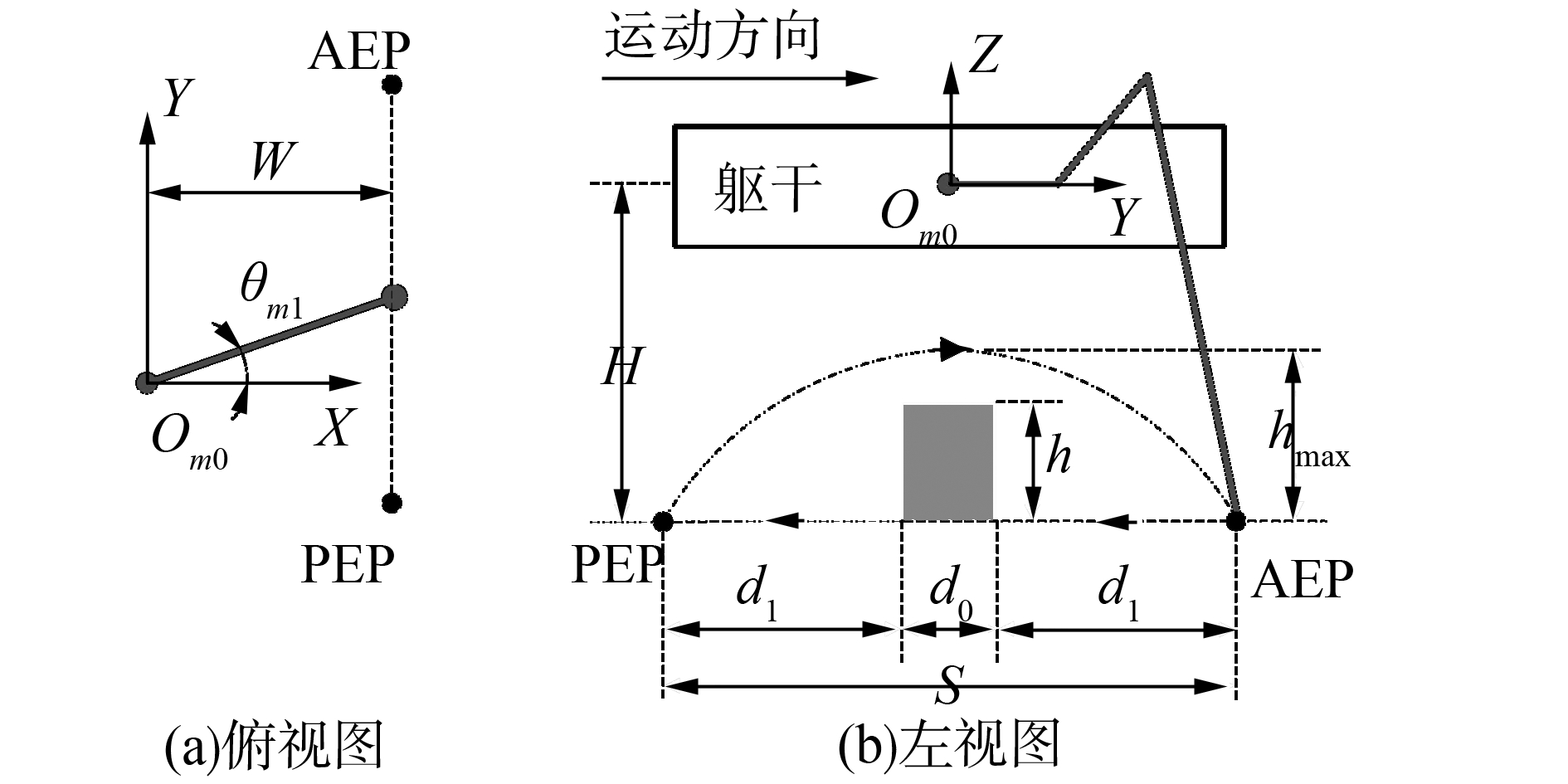
图5 单腿运动过程
Fig.5 The movement procedure of single leg
通常摆动相轨迹采用固定曲线,如抛物线、摆线以及圆弧线等,相对而言采用高次多项式描述轨迹的方法能够根据需要定制曲线,更适合于具有自适应特性的轨迹规划。文中通过调整步长、抬腿高度和迈腿时间改变机器人行走方式,即摆动相的轨迹。为完成摆动腿的越障动作,且减小对壁面的冲击以降低对机器人的振动,需满足一定的条件:1)足端与关节运动轨迹连续、平滑无冲击;2)足端与关节在AEP和PEP点处的速度和加速度为零;3)足端与关节的速度和加速度连续且无冲击;4)机器人作壁面爬行运动,为提高其稳定性,减少倾覆力矩,要求躯干与壁面的距离尽量小。取摆动轨迹的中点为轨迹最高点,足端坐标为

(6)
1)足端坐标px
三足步态时机器人沿Y轴方向直线行走,可得:
px=W
(7)
2)足端坐标py
对于三足步态,当t∈[0,T/2]时单腿处于摆动相,应满足约束条件:![]() 式中T为步态周期,S为半步长,摆动相py的方程为
式中T为步态周期,S为半步长,摆动相py的方程为

(8)
当t∈[T/2,T]时处于支撑相,需满足约束条件:![]() 故单腿处于支撑相时py的方程为
故单腿处于支撑相时py的方程为

(9)
3)足端坐标pz
三足步态下,当t∈[0,T/2]时单腿处于摆动相,需满足约束条件:![]() 故摆动相时pz的方程为:
故摆动相时pz的方程为:


(10)
当t∈[T/2,T]时单腿处于支撑相,pz的方程为
pz=-H
(11)
因此,给定具体参数后可以得到三足步态时足端轨迹曲线,图6所示为腿R2的足端轨迹,摆动相时为连续平滑的弧形曲线,支撑相时为直线。
四足步态时,对于任一条腿,其步态周期分为3等份,第一个是摆动相,其余两个是支撑相。摆动相轨迹同三足步态时一样,而后两个支撑相的轨迹是一条线段,由两条方向、长度均相同的线段首尾相连而成,其足端轨迹曲线同三足步态时类似。五足步态实现原地旋转,腿R2摆动相轨迹如图7中实线所示,在Z轴方向有高度变化,在XY平面上投影是一段圆弧;支撑相轨迹由5段长度相同的圆弧首尾相连构成,该圆弧曲线与摆动相曲线在XY平面上的投影重合。
图6 三足步态腿R2足端轨迹
Fig.6 The foot trajectory of leg R2 of tripod gait
图7 五足步态腿R2足端轨迹
Fig.7 The foot trajectory of leg R2 of wave gait
3 吸附力分析
爬壁机器人实现安全稳定行走,需实时控制足端吸盘的真空度,提供合理的足端反作用力分配。为建立足端所需吸附力数学模型,作如下假设:
1) 爬壁机器人运动时,因速度较低,故可视为准静态运动进行分析;
2) 考虑到机器人摆动腿步幅不大,而且躯干构型呈正八边形,质量主要集中在躯干部分,故可认为机器人重心位于躯干的几何中心;
3) 吸盘所能承受的最大旋转转矩(转矩方向与吸盘面法线方向平行)远大于其所能承受的各个方向的最大翻转转矩(转矩方向与吸盘面平行)。
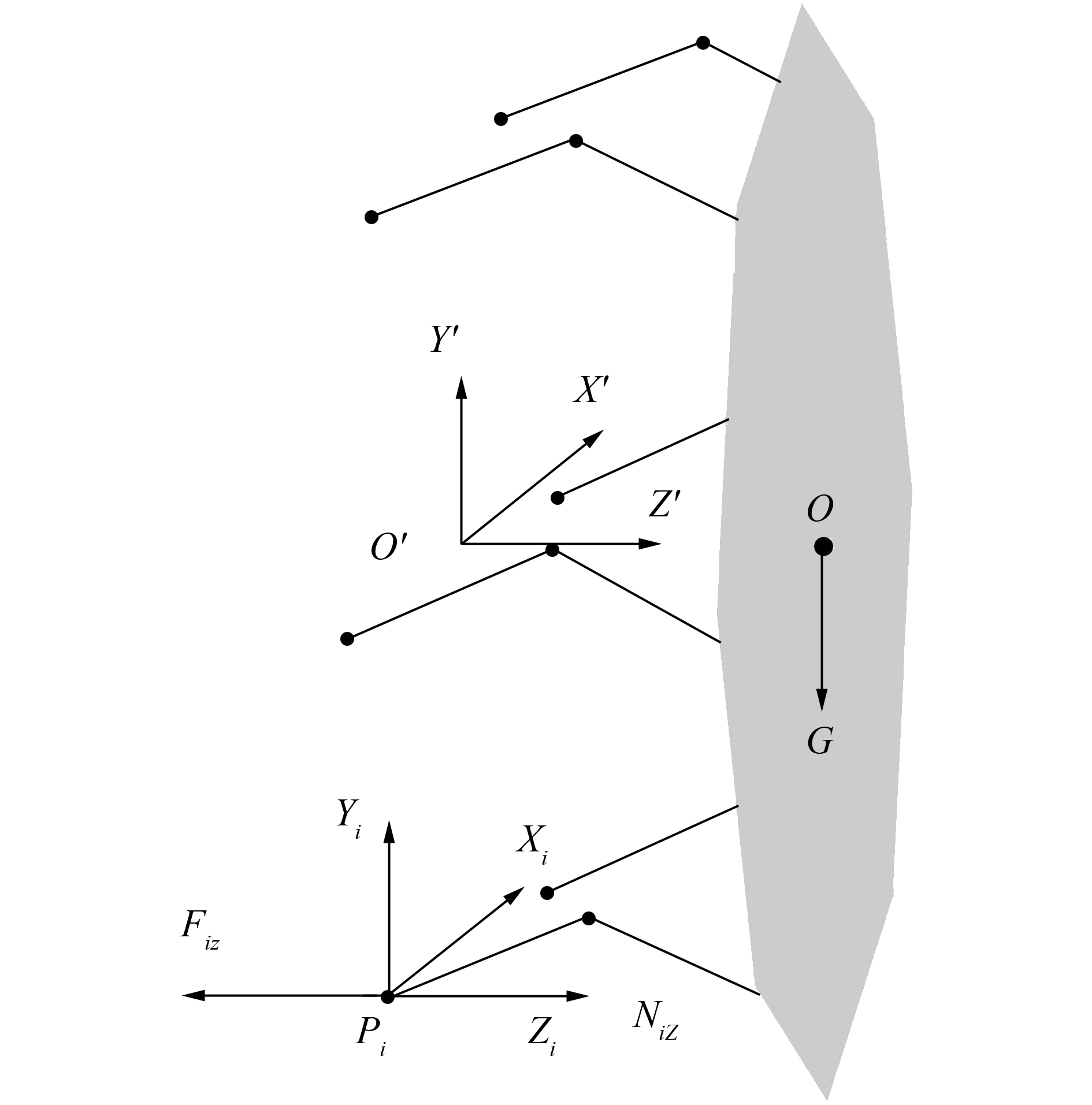
如图8所示,以机器人整体为研究对象建立坐标系,其中O为重心,O′为O在壁面上的垂直投影,X′为水平方向,Y′为竖直方向, Z′为壁面法线。Pi为第i条支撑腿足端在坐标系O′X′Y′Z′下的坐标。假设Ni=[NixNiyNiz]T和Fi=[FixFiyFiz]T分别为机器人第i条腿的足端吸盘在Pi=[PixPiyPiz]T位置所受的壁面反作用力和吸附力。机器人在竖直壁面上的静平衡取决于支撑腿足端的吸附力Fi及反作用力Ni的法向分量Fiz和Niz,为保证机器人可以稳定吸附在竖直壁面上,建立力、力矩平衡方程:
(12)
(13)
式中:n为支撑腿个数且3≤n≤6,μ为壁面与吸盘间的摩擦系数,Gx和Gy分别为重力G在X′和Y′轴上的分量。为使机器人步态切换时各吸盘充放气时间相等而便于控制,通常使每个吸盘的真空度相同,即吸附力均相等,Fiz=Fz=G/nμ。因此力和力矩平衡方程可变为
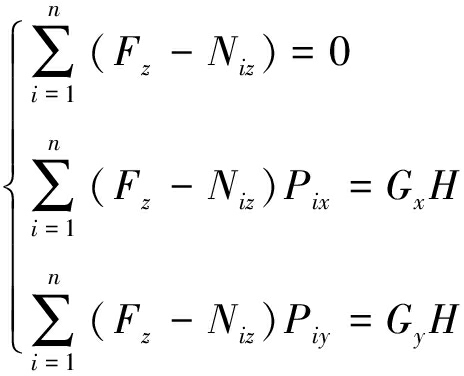
(14)
将上述方程组转化成矩阵形式为
T=A×F
(15)
式中:
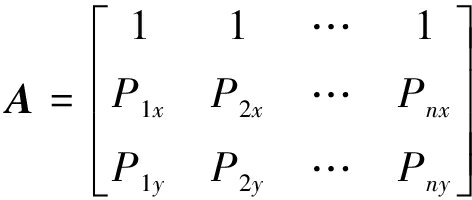

即
F=A-1×T
因此当机器人以三足步态行走时,可求得吸附力Fz及反作用力Niz的唯一解。但是在四足越障步态、五足旋转步态和六足静止状态时,Niz的值不唯一,需要增加约束条件。考虑到当Niz趋于一致时,机器人承载能力大、能耗小且对幕墙壁面的压力相对均匀。因此,设定幕墙对足端反作用力Niz的方差最小作为目标函数:

(16)
式中![]()
因此在计算四足、五足和六足支撑情况下,可先求出吸盘吸附力,然后足端反作用力可通过目标优化求解合理分配。
图8 机器人受力示意图
Fig.8 The forces sketch map of robot
4 基于CPG的运动控制
4.1 越障策略
机器人实现自主越障应根据L1腿和R1腿上安装的测距传感器和躯干上的陀螺仪实时监测前方障碍距离以及自身姿态,此外机器人在竖直壁面上爬行,为增加稳定性和安全性,要求本体不能与障碍发生碰撞。按如下顺序执行动作:
1)如果距离前方障碍较远,采用大步长、小步高的三足步态爬行方式;
2)如果距离前方障碍较近,采用小步长、小步高的三足步态,直到机器人与障碍间的距离满足图5中所示d1的范围;
3)采用五足步态进行原地旋转,根据陀螺仪数据调整自身姿态,直至L1腿和R1腿与前方障碍的距离相等;
4)采用四足步态,调整躯干与壁面间的距离(根据障碍尺寸将躯干抬高至适当的距离),调整待越障腿与障碍间的距离;
5)采用四足步态进行越障,一个步态周期后使2条腿跨过障碍;
6)重复4)和5)直至所有腿越障完毕,然后降低躯干与壁面间的距离,采用三足步态继续前进。
越障时足端轨迹除满足图5所示要求外,步长还需满足如下条件:
(17)
式中:r为吸盘半径,d1为PEP和AEP至障碍的距离,Smax为机器人最大步长,几何关系参照图5。完整越障过程如图9所示。

图9 六足机器人行走路线示意图
Fig.9 Sketch map of walking route of the hexapod robot
4.2 运动控制
由于壁面存在障碍,添加了障碍探测模块和位姿调整模块,然后将传感器信息和障碍信息输入到以CPG为核心的自适应运动控制神经单元,从而完成:1)各腿间相互协调并生成不同步态;2)基于越障策略完成步态切换;3)按照不同步态所规划的足端轨迹,得到各个关节的运动控制指令;在此基础上实现自主越障。完整的运动控制系统如图10所示。具体实现方法如下:
图10 运动控制系统
Fig.10 Motion control system
4.2.1 障碍判断及处理单元
障碍判断及处理单元由障碍探测模块和位姿调整模块组成,用于探测障碍距离并调整机器人位姿。
障碍探测模块:主要是通过前两足上的测距传感器检测障碍距离,并由陀螺仪获得机体姿态;当探测到障碍时,信息会被传递到自适应运动控制神经单元的神经预处理模块,从而调整机器人的步态。同时信息传递到位姿调整模块,用于调整机器人相对于障碍的位姿。
位姿调整模块:根据越障策略,机器人与障碍之间需满足一定的距离和姿态要求,该模块根据接收到的传感器信息,采用五足旋转步态使机器人正对障碍;按照越障策略调整机器人与障碍之间的距离;然后改变机器人躯干与壁面间的距离(如图5中的H所示),避免躯干在越障过程中与障碍发生碰撞,完成越障准备。
4.2.2 自适应运动控制神经单元
自适应运动控制神经单元产生机器人行走的基本步态,它包括4个模块:神经预处理模块、自适应神经混沌控制模块、CPG后处理模块和电机控制神经模块。通过这些模块的作用,机器人可以根据传感器信息,合理规划机器人步态。
神经预处理模块包含几个独立的组件用于消除信号噪声并传递信号,当传感器信号进入到神经预处理模块后,对传感器信号进行滤波,并将信号数值设置在[-1,1],然后输入到电机控制神经模块和自适应神经混沌控制模块。
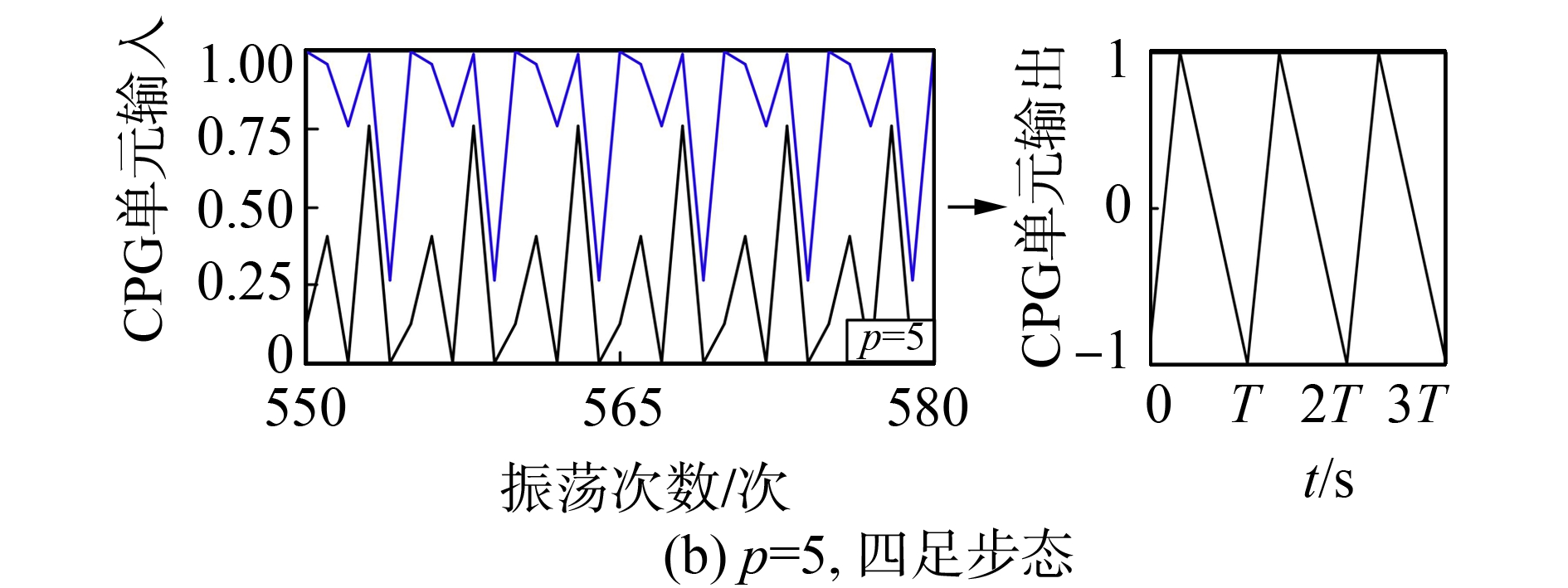
自适应神经混沌控制模块的作用是根据输入信息选择合理的控制目标周期p(见图9),周期p不同将会产生不同的运动步态。该模块中有一个CPG模型,它根据p的变化产生原始周期信号,当周期p的值发生变化时,机器人的步态也将会发生变化,周期p所对应的机器人步态如表1所示。
表1 不同运动状态下的步态列表
Table 1 List of gaits in different motion status
CPG模型:由两个神经元相互耦合而成的神经网络,如图11所示。每个神经元的离散输出xi(t)∈(0,1),并且满足:

(18)
式中:i∈{1,2},σ(x)是sigmoid激励函数,其表达式为σ(x)=(1+exp(-x))-1。θi和wij是突触权重,控制信号![]() 取决于参数
取决于参数![]() 满足方程:
满足方程:
(19)
式中:Δj(t)为一个参数p时间周期中神经元输出xj(t)之差,即Δj(t)=xj(t)-xj(t-p)。μ(p)(t)是控制强度,它满足如下方程式:
(20)
式中:λ是适应率,λ∈[0,1],决定了控制强度μ(p)的更新速率。当参数p发生变化时,控制强度μ(p)的初始值μ(tinitial)=-1。
CPG后处理模块:CPG输出的离散化节律信号经偏置单元、时间窗单元、滞回单元、积分单元后将信号变为从-1到1周期性上升和下降的三角波信号,输入到电机控制神经模块中,后处理单元如图12所示。这样CPG单元输出波形变为具有步态适应性的三角波振荡信号[15],如图13所示。该振荡信号经延迟处理后,按照一定的时间差依次输入到6条腿中,使各腿之间形成一定的相位差。
图11 CPG控制器
Fig.11 Diagram of the neural control circuit (CPG)
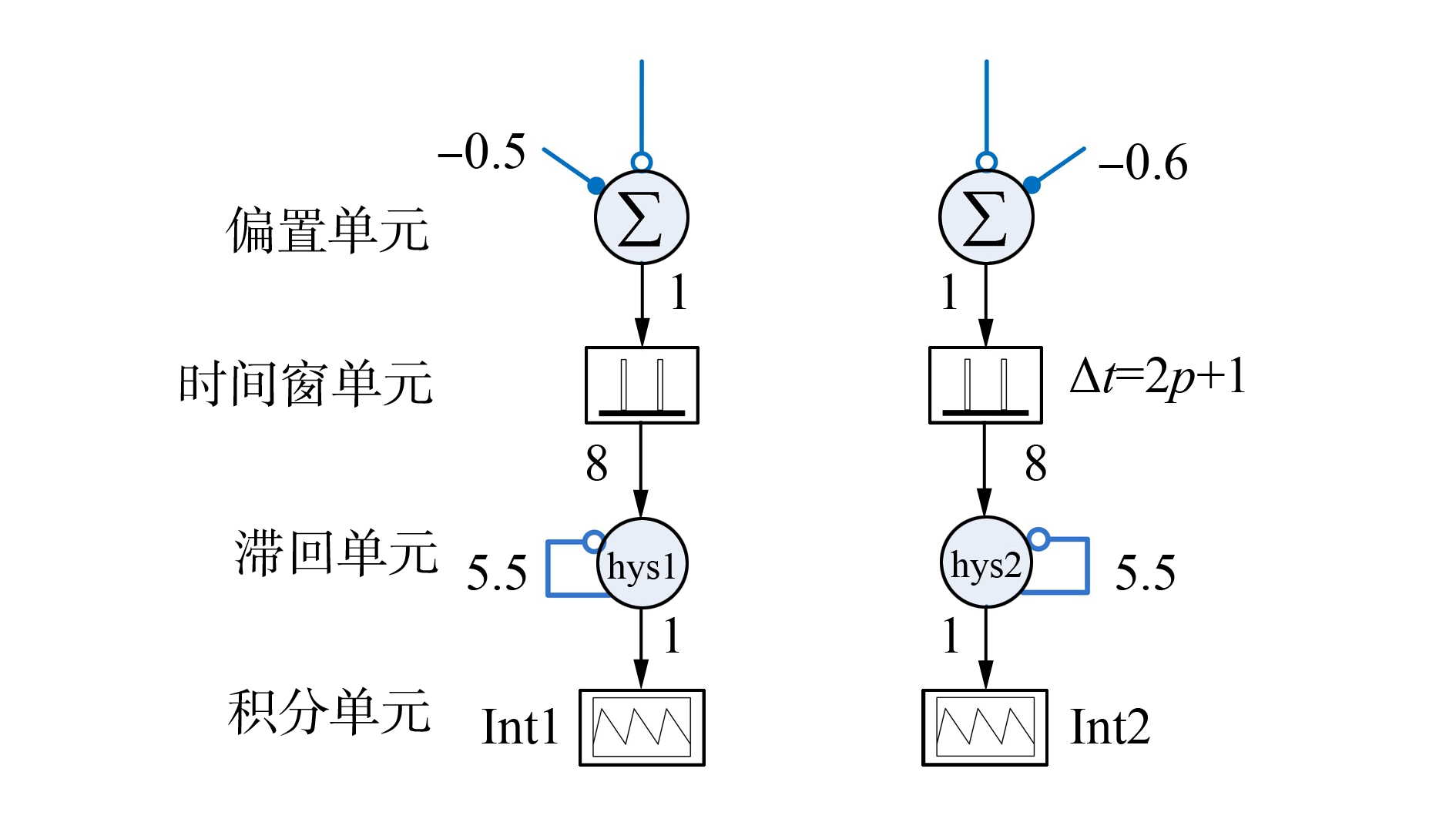
图12 CPG后处理模块
Fig.12 CPG postprocessing modules
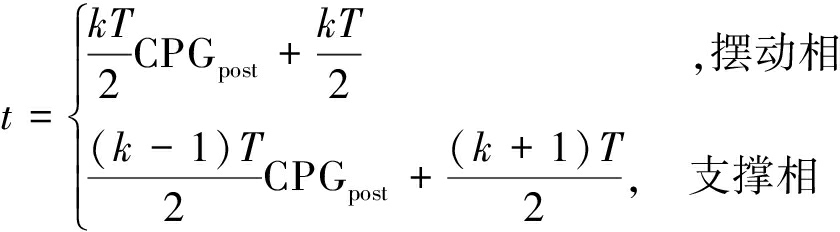
电机控制神经模块:为控制机器人按照越障策略行走,需将这些三角波振荡信号映射到所规划的各腿足端轨迹,求出足端轨迹对应的运动学逆解,从而得到各个关节的运动控制指令,并传送到18个关节电机。如前文所述,足端轨迹是时间t的函数,为了匹配CPG后处理信号和足端轨迹,设计映射函数为
(21)
式中:CPGpost表示CPG后处理模块的输出信号,在摆动相机器人足端从PEP摆动到从AEP,相应的该信号从-1不断上升到1;在支撑相,足端从AEP运动到PEP,则该信号从1不断下降到-1。k为变换增益,对于三足、四足和五足步态其值分别为1/2,1/3和1/6。T为步态周期。
图13 CPG单元输出及相应的后处理模块输出信号
Fig.13 Outputs of CPG module and its post-processing module
图14表示机器人运动过程中会根据环境变化采取一系列相互转化的步态,利用三足步态向前行走,当探测到障碍后,机器人以五足步态原地旋转调整姿态正对障碍,然后利用四足步态跨越障碍。从所有步态中每条腿的相序图可知,周期p值越大,单腿的占地系数越大,机器人行走速度越慢。通过添加障碍判断及处理单元,实现了机器人使用不同步态完成自主行走和越障。
5 爬壁结果分析与讨论
5.1 关节运动轨迹
实验中设计的六足机器人基节长度为120 mm,股节长度为200 mm,胫节长度为360 mm。并设定步态周期为2 s,步长为250 mm,足端抬起最大高度为150 mm,支撑宽度为440 mm,足端到躯干的垂直距离为170 mm,根据运动学方程和足端运动轨迹函数,求得各关节的角度曲线,从而驱动各关节实现六足机器人的爬壁运动。在一个二步态周期内,单腿三关节的角度、角速度和角加速度的变化曲线分别如图15所示。

图14 三种步态的相序图
Fig.14 Sequence diagrams of three different gaits
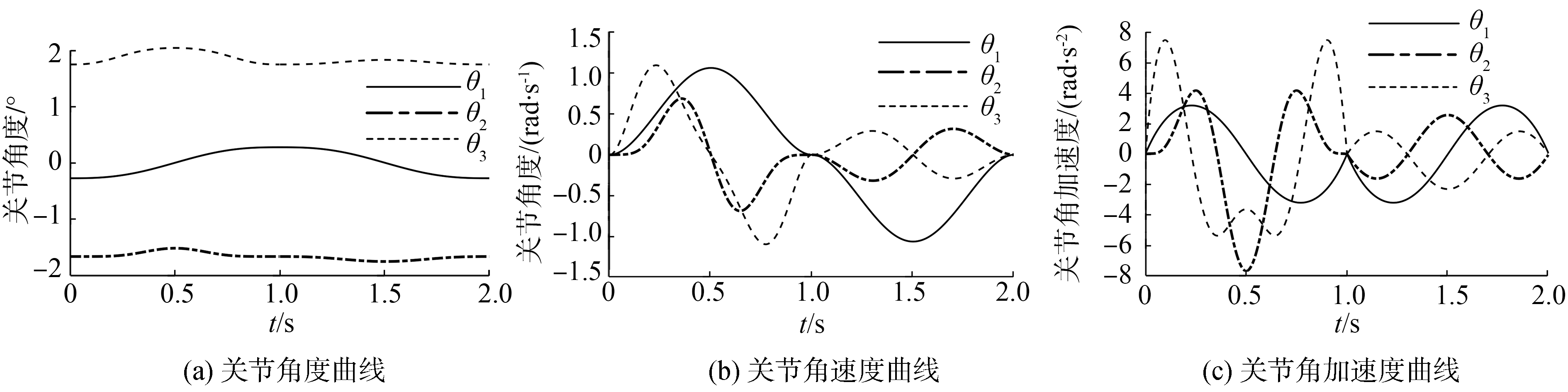
图15 一个二步态周期内,单腿三关节的角度、角速度和角加速度的变化曲线
Fig.15 The joint angle curve, the pint angular reldity cune and the joint angular acceleration curve of the single leg′s three joints in a gwo gait cycle
从图中可以看出,运动过程中各关节角度曲线平滑连续,角速度和角加速度曲线连续无突变,落点处的关节角速度和角加速度值均为零。而且可以根据实际环境改变越障时的步长和步高,得到的结果均满足设计要求。
5.2 足端吸附力和壁面反作用力计算
足端吸附力和壁面反作用力的大小与机器人支撑腿足端的位置以及其自身姿态有关,文中取爬壁机器人的常用姿态作为研究背景。机器人质量50 kg,吸盘材料为丁腈橡胶,与壁面间的摩擦系数为0.5。
在分析壁面与机器人足端之间的作用力时,本文采用牛顿下山法进行迭代计算。针对三足步态和四足步态,实验中考虑机器人沿正前方即Y轴向上爬动时的瞬态受力情况;五足步态考虑机器人逆时针旋转时与X轴正向成0°到10°的原地旋转过程;对于其它姿态,可采用同样的分析方法得到其相应的瞬态受力情况。每种步态下的各支撑腿足端吸附力均取相等值,通过迭代一定的次数(四足时迭代次数为20,五足时迭代次数为40,六足时迭代次数为70),得到优化的壁面反作用力值。本文利用位移传感器测量弹簧位移,通过逆运动学求解出爬行过程中壁面对足端的垂直反作用力,如图16所示。可以看出,与理论值相比,实际中由于腿部质量、基体移动和位移传感器测量精度而产生偏差,但各足端的实际受力与理论值基本相同,表明通过优化达到了壁面受力相对均匀的要求。
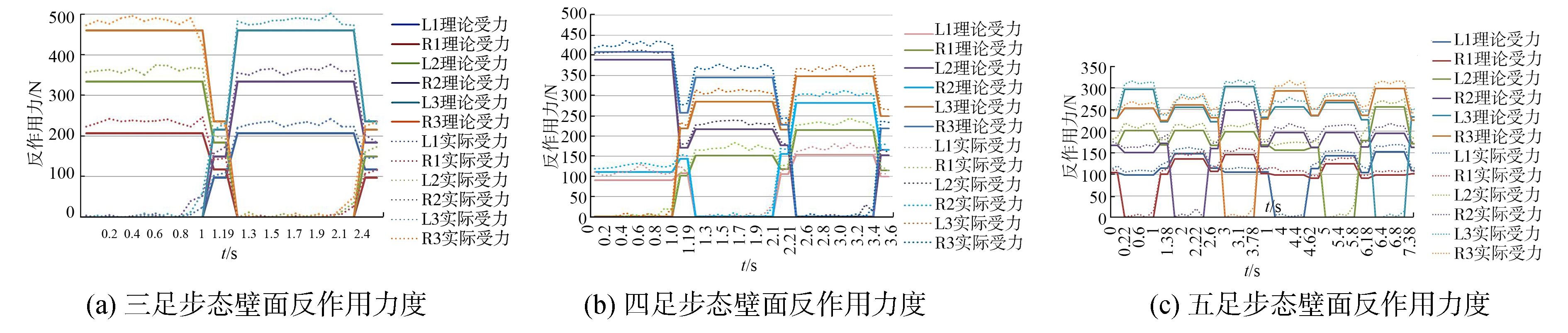
图16 三足、四足、五足步态壁面反作用力曲线
Fig.16 Counterforce curve under tripod gait counter force curve under tetrapod gait ard connterforce curve arder wave gait
5.3 样机爬壁试验
为验证本文步态规划方法及控制系统的可行性,利用样机在竖直壁面上进行了多种步态的试验,试验过程的视频截图如图17所示,图(a)中1表示机器人的起始姿态,采用三足步态,白点用于标识运动腿,其余的为支撑腿,2,3表示三足行走过程;图(b)中1表示机器人的起始姿态,采用五足步态进行原地旋转,白点用于标识运动腿,其余的为支撑腿,2~4表示五足原地旋转过程;(c)中1表示机器人的起始姿态,采用四足步态,白点用于标识运动腿;其余的为支撑腿,2~7表示四足越障过程。为便于结果分析,实验结果以步态图的形式给出,从中可以看出该样机完成了预定的自主越障爬壁运动。
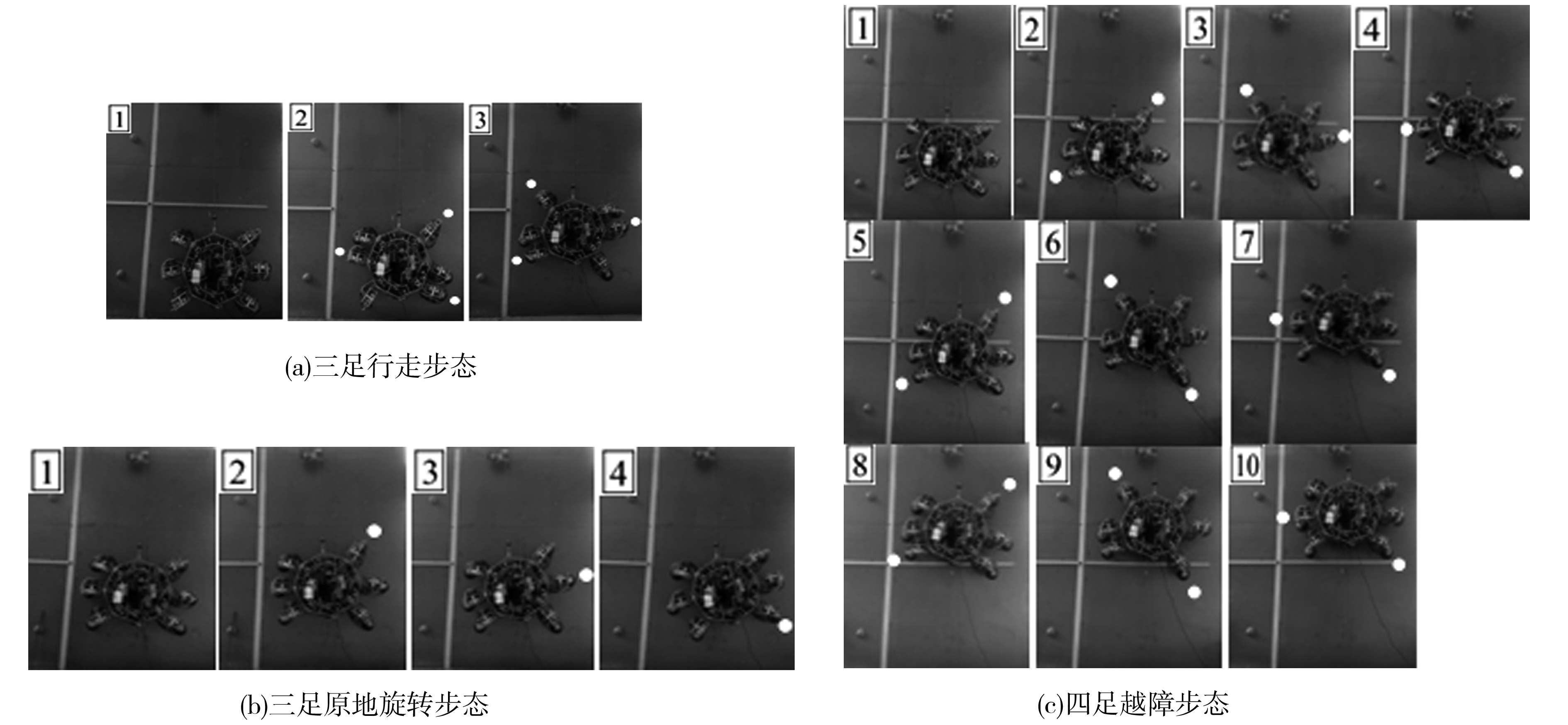
图17 自主越障过程中的步态
Fig.17 Gaits of the procedure of autonomous obstacle crossing
6 结论
1) 采用高次多项式描述轨迹的方法适合于具有自适应特性的轨迹规划,生成的轨迹平滑无冲击,在AEP和PEP位置机器人关节的角度、角速度和角加速度都连续、平滑、无突变,完全满足爬壁机器人足端对幕墙的低冲击要求,而且腿部运动平缓有利于机身的平衡性和稳定性。
2) 对采用吸盘负压吸附的多足机器人建立了力/力矩平衡方程,给出了吸盘吸附力和各支撑腿足端受到的反作用力的计算方法,通过目标优化合理分配各支撑腿足端受到的反作用力,提高了机器人对各种步态运动模式的适应能力,保证了机器人在爬壁时的安全性。
3) 控制系统由CPG组成,并添加了障碍探测模块和位姿调整模块,通过传感器反馈的信息,选择合理的控制目标周期p,从而改变机器人步态,符合制定的越障策略,通过实验验证了3种步态的正确性,完全满足自主爬壁及越障要求。


