
摘 要: 准确的运动学位置正逆解分析是对机械臂进行轨迹规划、运动控制和动力学分析等的基础。以某型码垛机械臂为研究对象,分别采用D-H法和解析法对其进行了位置正逆解分析,两种方法的分析结果一致,一定程度验证了分析方法和结果的可靠性,为后续研究奠定了基础。
关键词: 码垛机械臂;D-H法;解析法;运动学分析
0 引言
码垛机械臂可在生产过程中执行拾取、搬运、码垛和拆垛等任务,能有效降低作业人员的劳动强度,并提高作业效率、作业精度和产品质量,目前广泛应用于汽车船舶、食品饮料、烟草、水泥和制砖等行业[1-3]。
码垛机械臂运动学位置正解分析是指已知连杆参数和各驱动关节角度,求解末端执行器相对于基坐标系的位姿;位置逆解分析是指已知连杆参数和末端执行器的相对位姿,求解各驱动关节的角度。位置正逆解分析是进行后续轨迹规划、动力学分析和运动控制等的基础[4]。本文在简要分析码垛机械臂结构的基础上,研究采用D-H法和解析法对其进行运动学位置正逆解分析。
1 码垛机械臂结构
以某型码垛机械臂为例,其结构如图1所示。该机械臂包含4个主动关节,分别为腰部、腕部的旋转关节以及大臂、小臂的转动关节。工作原理为:底座是整个机械臂的安装基础;腰部电机安装在底座上,以驱动腰部关节旋转;大臂、小臂电机安装在腰部,分别驱动大臂和小臂关节摆动;因平行四边形机构Ⅰ的作用,大臂控制小臂的空间位置,大臂的摆动会形成小臂的伸缩运动,小臂驱动臂控制小臂的姿态,小臂驱动臂的摆动会形成小臂的俯仰运动;异形连杆的姿态因平行四边形机构Ⅱ的作用而保持不变,而位置随大臂的摆动而变化;由于平行四边形机构Ⅲ的作用,腕部与异形连杆的相对姿态保持不变,可使腕部的旋转轴始终垂直于底座平面,而腕部的位置随小臂的运动而变化。该机构巧妙的利用了3个平行四边形机构,利用简单的机械约束,实现了腕部姿态的固定不变。与传统的3自由度串联关节机械臂相比,该机构将小臂的驱动电机下移,降低了机械臂的重心,提高了刚度和强度,使运行更加稳定。

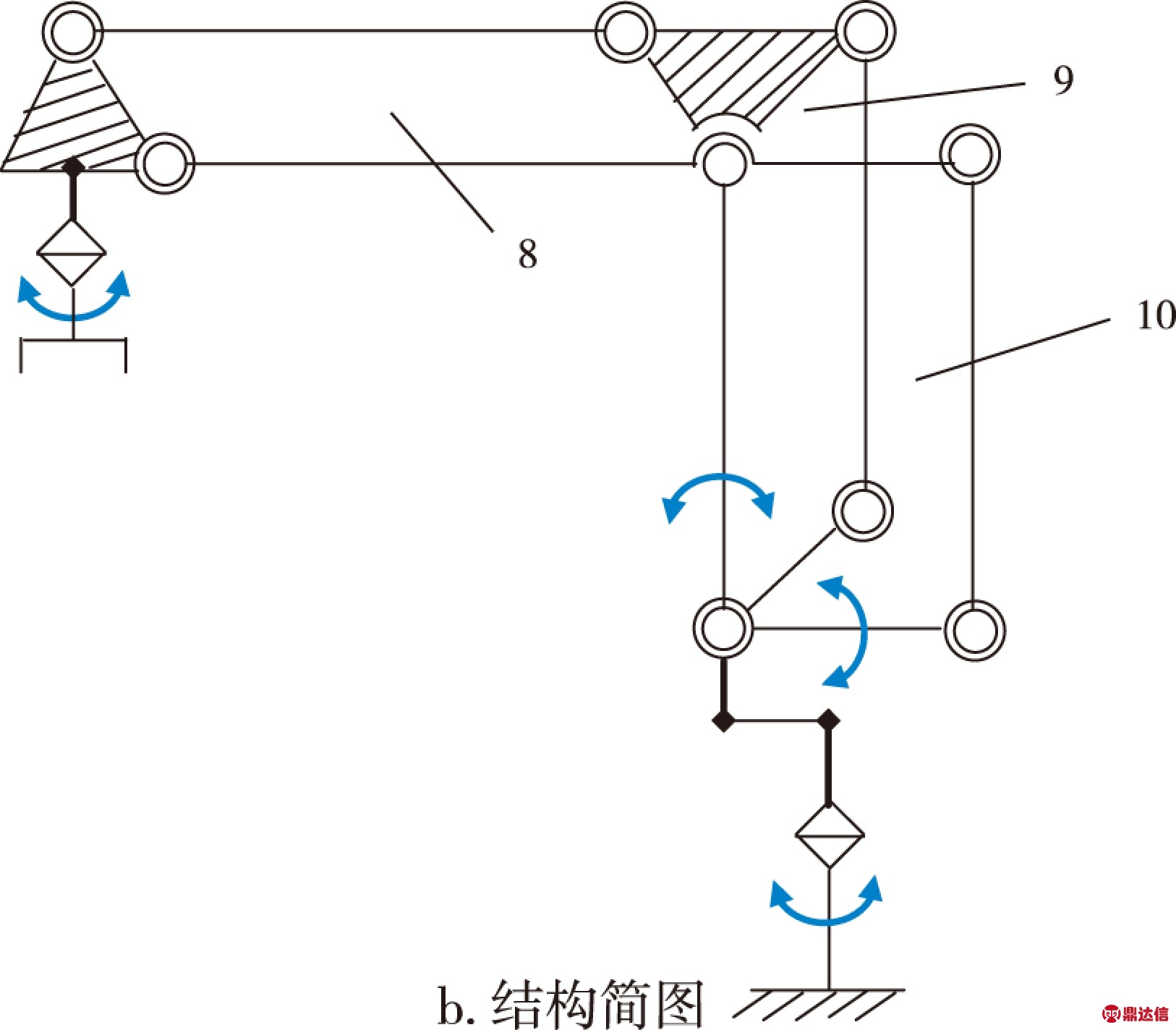
1.腕部 2.小臂 3.异形连杆 4.大臂 5.小臂驱动臂
6.腰部 7.底座 8.平行四边形机构Ⅲ 9.平行四边形机构Ⅱ 10.平行四边形机构Ⅰ
图1 码垛机械臂结构
Fig.1 Structure of palletizing mechanical arm
2 基于D-H法的机械臂位置正逆解分析
Denavit-Hartenberg法(简称D-H法)是一种针对串联机构简单实用的建模与运动学分析方法。其为机械臂各连杆各固定一个坐标系,用4×4的齐次变换矩阵描述相邻两连杆之间的空间关系,从而可推导出末端坐标系相对基坐标系的等价齐次变换矩阵,并建立机械臂的运动学方程[5]。
2.1位置正解分析
根据码垛机械臂的特性对其机构模型进行适当简化:①忽略平行四边形机构Ⅰ,将大臂和小臂铰接处的转动副视为主动关节,使小臂和转台间的平面闭链变为平面开链;②忽略平行四边形机构Ⅱ和Ⅲ,在小臂和腕部铰接处增加一转动关节,使腕部旋转轴始终保持竖直姿态;③忽略腕部的旋转关节,将其视为腕部的1点。利用D-H法描述的码垛机械臂机构模型如图2所示,连杆坐标系采用了前置式。
表1给出了各杆的D-H参数和关节变量[6-7]。
表1 码垛机械臂D-H参数
Tab.1 D-H parameter of palletizing mechanical arm
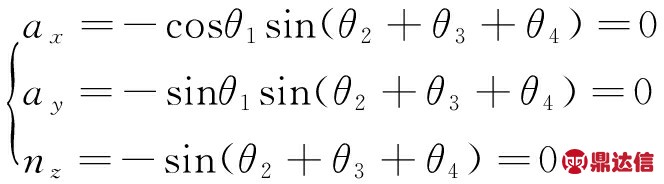
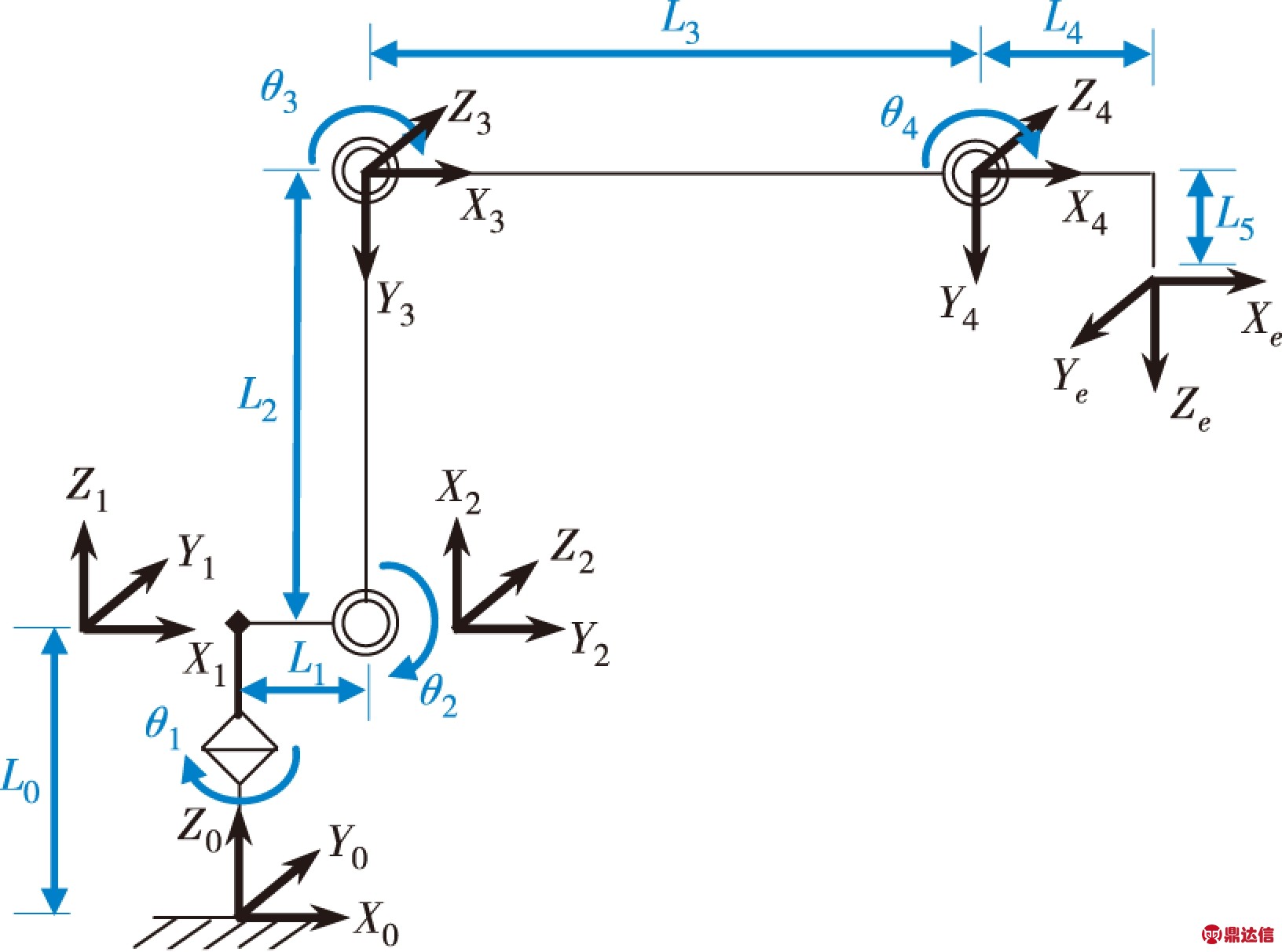
图2 D-H法机构示意
Fig.2 Schematic of D-H method mechanism
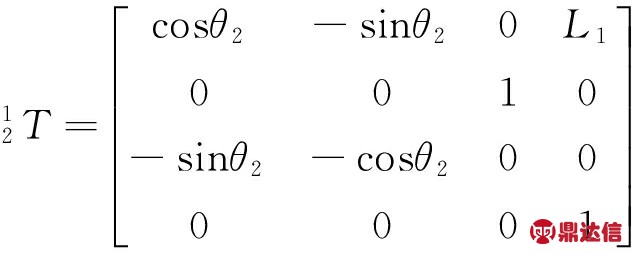
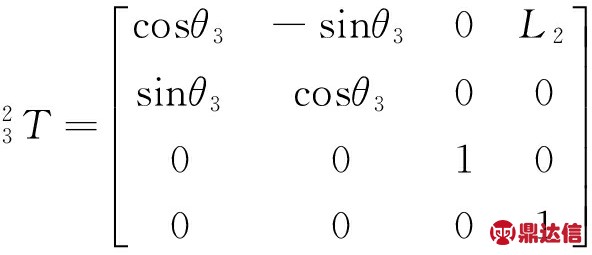
各坐标系间变换公式为![]() T=
T=
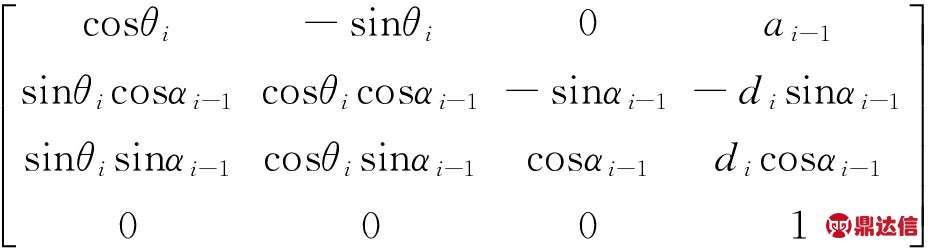
(1)
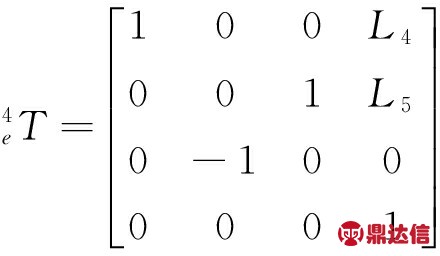
码垛机械臂末端相对于基坐标系的变换矩阵为![]() T
T
(2)
由表(1)和式(1)可得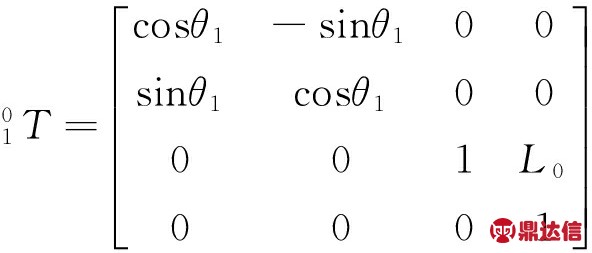

代入式(2),可得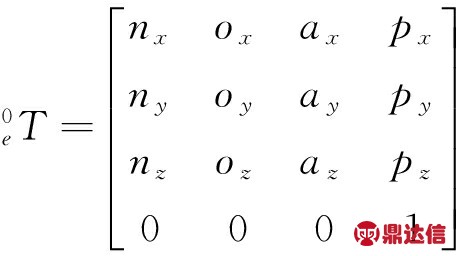
(3)
式中,
nx=cosθ1cos(θ2+θ3+θ4);ny=sinθ1cos(θ2+θ3+θ4);nz=-sin(θ2+θ3+θ4);
ox=sinθ1;oy=-cosθ1;oz=0;
ax=-cosθ1sin(θ2+θ3+θ4);ay=-sinθ1sin(θ2+θ3+θ4);az=-cos(θ2+θ3+θ4);
px=L1cosθ1+L2cosθ1cosθ2+L3cosθ1cos(θ2+θ3)+L4cosθ1cos(θ2+θ3+θ4)-L5cosθ1sin(θ2+θ3+θ4);
py=L1sinθ1+L2sinθ1cosθ2+L3sinθ1cos(θ2+θ3)+L4sinθ1cos(θ2+θ3+θ4)-L5sinθ1sin(θ2+θ3+θ4);
pz=L0-L2sinθ2-L3sin(θ2+θ3)-L4sin(θ2+θ3+θ4)-L5cos(θ2+θ3+θ4)
这里,用关节角度θ4替代平行四边形机构Ⅱ和Ⅲ功能,使腕部旋转轴始终保持竖直姿态。码垛机械臂末端坐标系可视为基坐标系先绕X轴旋转180°、后绕Z轴旋转角度β、再沿矢量P=[px py pz]T平移后获得,即
(4)
对比式(4)与式(3),可知
(5)
联立求解,可得θ4=-θ2-θ3
(6)
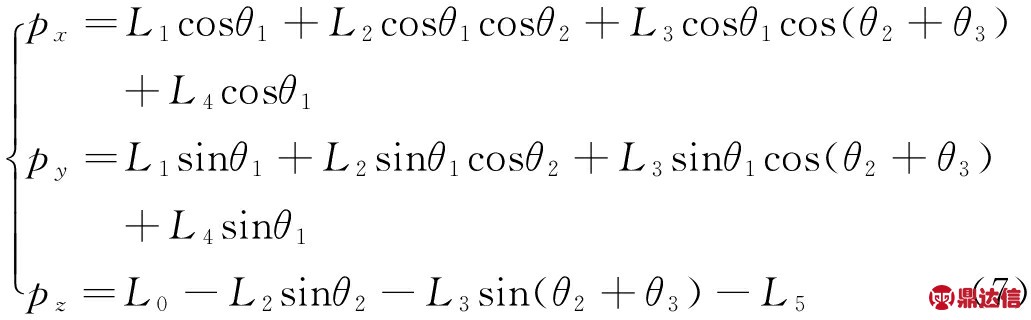
将式(6)代入式(3),可得β=θ1,可知,若使腕部旋转关节的转角θ5始终为θ5=-θ1,可使码垛机械臂末端坐标系相对于基坐标系的姿态不变。此外,码垛机械臂末端坐标系在基坐标系中的位置为
 2.2位置反解分析
2.2位置反解分析
求解逆运动学,即已知码垛机械臂末端坐标系位置[px py pz]T,确定关节转角θ1、θ2和θ3。
![]() 的逆阵,由式(2)可得
的逆阵,由式(2)可得![]()
(8)
θ1的确定:
取式(8)两侧矩阵的(2,4)元素,可得pycosθ1-nθ1=0,因此
(9)
取式(8)两侧矩阵的(1,4)、(3,4)元素,可得

将式(10)两式分别取平方并相加,结合关节的转动范围,可得
(11)
其中,m=pxcosθ1+pysinθ1-L1-L4, n=L0-L5-pz。
θ2的确定:
将式(10)两式分别乘sinθ2和cosθ2,并相减,结合关节的转动范围,可得

(12)
3 基于解析法的机械臂位置正逆解分析
3.1位置正解分析
设图3所示码垛机械臂的位置为计算原点,大臂的转动角度为α2,小臂的转动角度为α3,逆时针旋转为正。
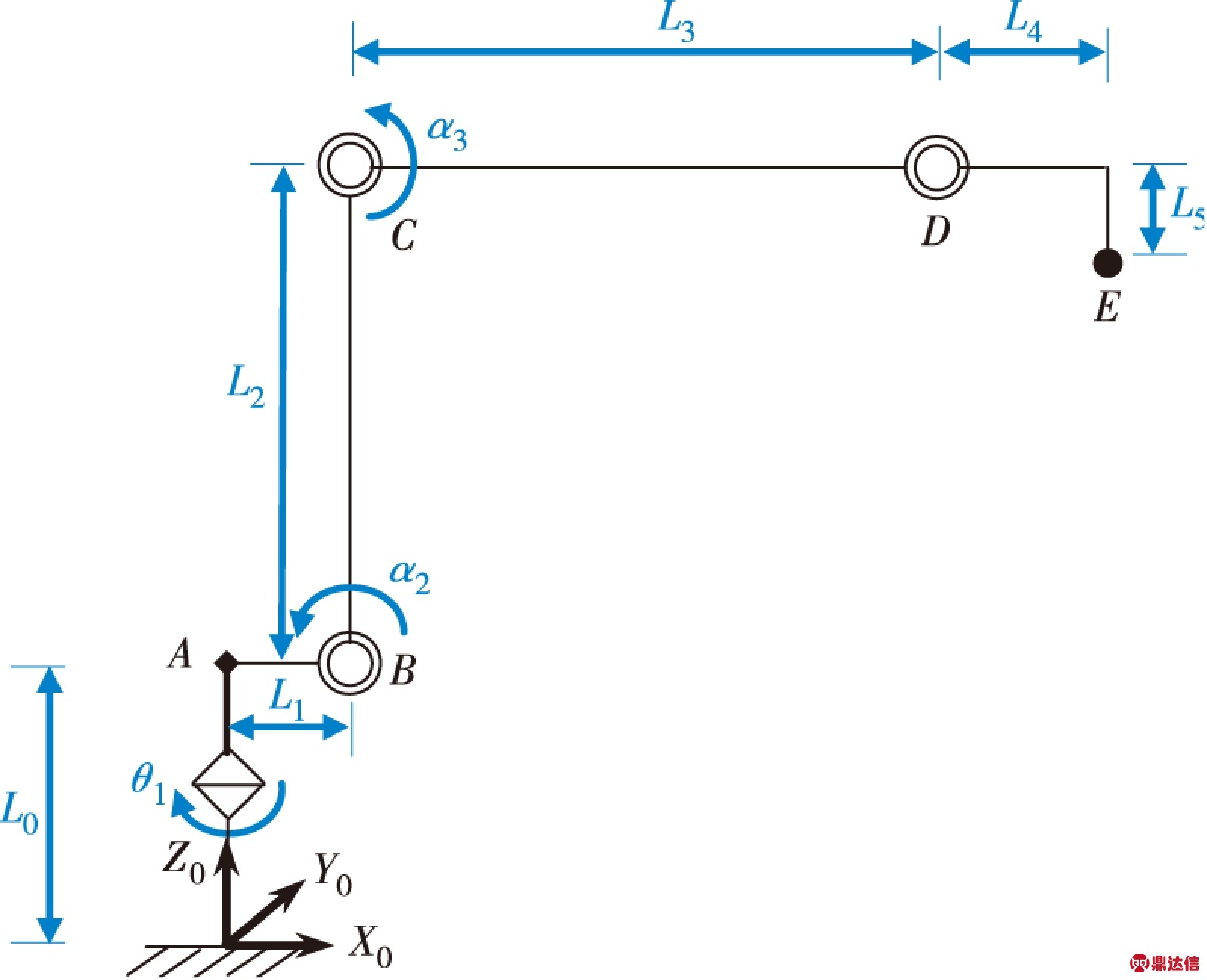
图3 解析法机构示意
Fig.3 Schematic of analytic mechanism
由于平行四边形机构Ⅱ和Ⅲ的作用,腕部旋转轴始终保持竖直姿态,即码垛机械臂末端坐标系原点E相对于小臂末端坐标系原点D的位置始终不变。若暂不考虑腰部关节的转动(θ1=0),由图3所示几何关系,E点在基坐标系的坐标可表示为:
(13)
该方法中大臂、小臂的计算原点和方向与D-H法不一致,其变换关系式为
(14)
将式(14)代入式(13),可得
若腰部关节的转动角度为θ1,则
该式与式(7)一致,说明解析法与D-H法具有相同的位置正解分析结果。
3.2位置反解分析
θ1的确定:
由式(15)式可知,
结合腰部关节的转动范围,可得
(16)
该结果与上述D-H法分析结果一致。
θ2、 θ3的确定:
由式(15)式可得,
即

式(17)与式(10)相同,故θ2、 θ3的计算结果同式(12)和式(11)。
可见,解析法与D-H法也具有相同的位置反解分析结果。
4 结论
(1)在对码垛机械臂构型进行分析和合理简化的基础上,分别采用D-H法和解析法对其进行了运动学位置正、逆解分析,两种方法的分析结果一致,一定程度上验证了分析方法和结果的可靠性。
(2)对于码垛机械臂位置正逆解的分析,D-H法求解思路虽然简洁明了,但与解析法相比,其计算量较大。因此,对于自由度较少、机构较简单的机械臂,可优先考虑采用解析法进行位置正逆解分析。


