
码垛机械手末端执行器挡板静态分析及优化
王明超, 何庆中, 赵献丹

| 【作者机构】 | 四川理工学院机械工程学院 |
| 【来 源】 | 《制造业自动化》 2011年第9期 P22-23,110页 |
| 【分 类 号】 | TP241 |
| 【分类导航】 | 工业技术->自动化技术、计算机技术->自动化技术及设备->机器人技术 |
| 【关 键 词】 | SolidWorks SolidWorksSimulation 末端执行器 静态分析 |
| 【基 金】 | 自贡市科技计划研究项目 (2010Q03) 泸州老窖科研基金项目 (2009ljzk08) 四川理工学院科研基金项目 (Y2009012) |
| 【摘 要】 | 本文通过SolidWorks建立码垛机械手末端执行器三维模型,并直接应用SolidWorks Simulation分析模块对码垛机械手末端执行器挡板进行有限元静态分析计算,并进行了优化和校核。结果表明优化后的结构满足要求,减轻了机械手末端执行器的重量,也验证了SolidWorks Simulation插件进行机械构件有限元分析正确性,对相关工程技术人员具有一定参考价值,并提供了一种实用的分析计算优化方法。 |
工业机器人已广泛的应用于工厂及企业当中来代替人类完成一些具有危险的,重复性的,以及无法完成的工作。目前工业机器人已广泛的应用于焊接、喷涂、搬运和装配等方面[1]。由于社会对生产效率和质量的要求越来越高,为满足不同企业的生产要求,工业机器人的设计及研究具有了更大的灵活性、挑战性及周期短的特点。三维软件及有限元分析软件在工业机器人的设计中起着重要的作用。本文研究的码垛机械手末端执行器主要用于从自动化生产线上提取食品、酒类等包装产品的自动码垛的夹持机构,对其进行有限元分析的目的在于保证机构灵活性、夹持可靠性及安全性要求的前提下,尽可能优化降低末端执行器的重量和惯量,提高码垛机械手码垛定位精度和自动化程度。本文首先在Solidworks中建立码垛机械手模型,再导入SolidWorks Simulation中进行静态分析并进行了优化,进而为机器人的机构分析及优化提供了方法。对从事该行业的工作人员有一定的指导作用。
1 码垛机械手的作业要求及结构
码垛机械手末端执行器的整体结构如图1所示,气缸带动左挡板延导杆方向运动完成抓取工作。通过分析计算得出,机械手整体的重量为14.5kg,其中左右挡板的重量为9.65kgm,近似占整个机械手重量的2/3,要想减轻机械手的重量,首先要对左右挡板进行优化。当夹紧货物时,挡板受力最大,如图2所示。本文在受力最大的情况下以左挡板为例进行静态分析并优化。

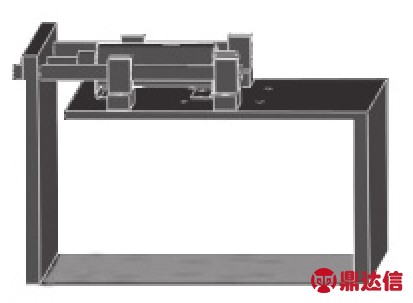
图1 码垛机械手的整体结构
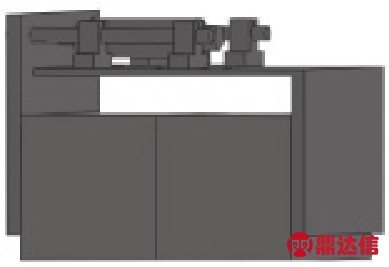
图2 夹紧货物时的情况
2 机械手挡板的SolidWorks Simulation静态分析
2.1 码垛机械手左挡板Simulation模型的建立
在SolidWorks界面下,点击工具>>插件,选取SolidWorks Simulation 插件,点击![]() 图标进入Simulation界面,点击文件打开挡板分析模型,如图3所示。单击主工具栏算例顾问
图标进入Simulation界面,点击文件打开挡板分析模型,如图3所示。单击主工具栏算例顾问![]() ,在其下拉菜单中选择
,在其下拉菜单中选择![]() 按钮,在名称中输入挡板分析,选择静态
按钮,在名称中输入挡板分析,选择静态![]() 。点击工具栏应用材料图标
。点击工具栏应用材料图标![]() ,在弹出的材料属性管理器中选取高强度铝合金7050,为挡板添加材料。
,在弹出的材料属性管理器中选取高强度铝合金7050,为挡板添加材料。

图3 挡板分析模型
2.2 为挡板添加约束及载荷
2.2.1 为挡板添加约束
在有限元静力学分析中,必须采用足够的约束来稳定模型[2]。通过分析添加如图4所示约束。
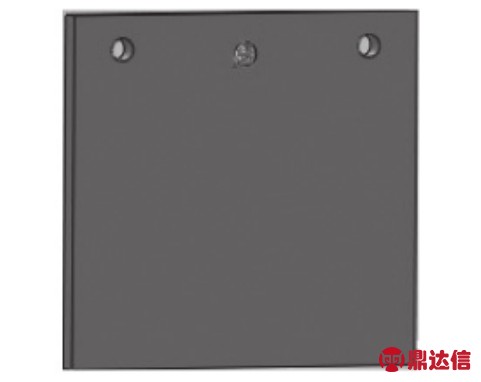
图4 添加约束的挡板分析模型
2.2.2 施加载荷
经计算作用在挡板上的力为178.2N,箱体与挡板夹持位置关系如图5所示,挡板受力部分在下半部,所以在施加载荷时要对挡板进行分割。施加载荷后的挡板分析模型如图6所示。
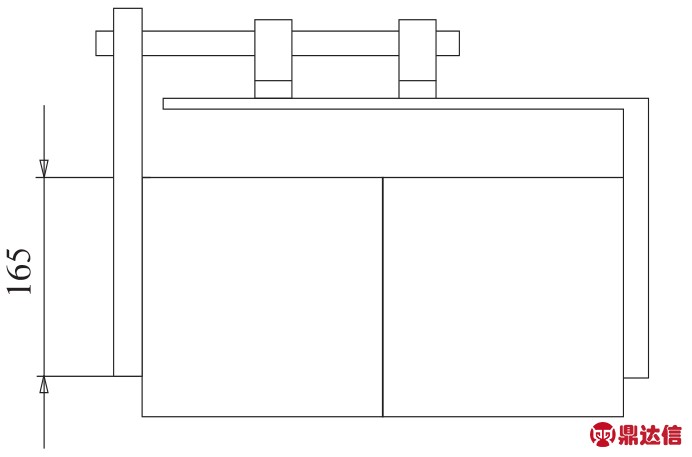
图5 箱体与挡板加持位置关系

图6 施加载荷及约束后的挡板模型
2.3 网格划分及静态分析
2.3.1 网格划分
网格化是设计分析过程中一个至关重要的步骤。SolidWorks Simulation的自动网格器会根据整体单元大小、公差及局部网格控制规格来生成网格。在设计分析的初期,近似结果足以满足需要,因此可以指定较大的单元大小来提高解算速度。要想进行更精确的解算,可能必须使用较小的单元大小[3]。本文在进行网格划分是采用SolidWorks Simulation默认值,网格划分后的挡板模型如图7所示。
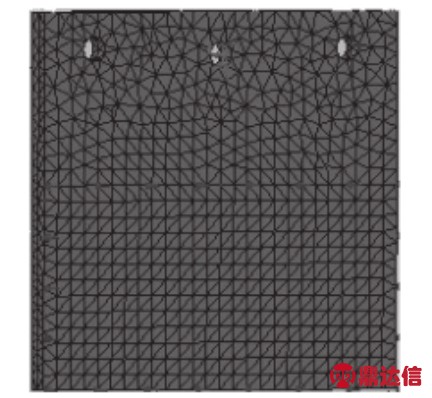
图7 网格划分
2.3.2 静态分析
2)通过对码垛机械手末端执行器挡板进行了有限元静态分析及优化,分析计算结果表明挡板强度能够满足使用要求,进一步验证了本文提出采用SolidWorks建立三维数学模型,直接应用SolidWorks软件中的SolidWorks Simulation插件模块进行机械构件的有限元分析计算方法和步骤的正确性。
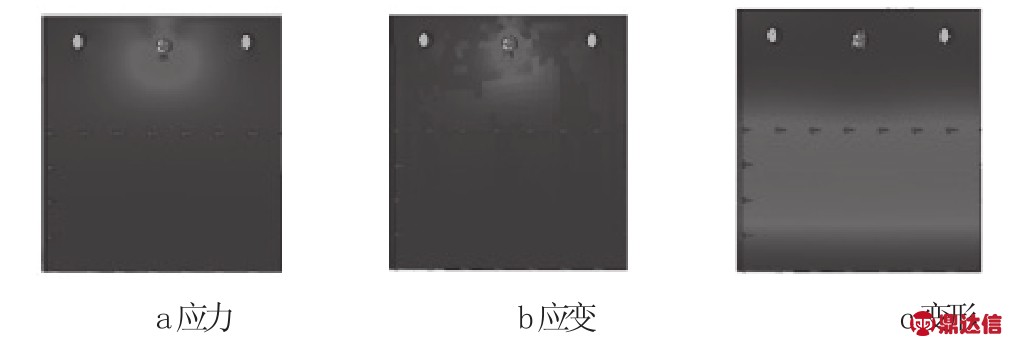
图8 静态分析
从图中可以看出与与汽缸连接的孔下部应力最大为7.4MPa,挡板底部变形最大为0.06mm。2.3.3 强度校核
挡板的材料为铝合金7 0 5 0,弹性模量E=7 2 G P a,泊松比µ=0.3 3,屈服极限σs≤435MPa,取其安全系数为N=1.5,可得出
根据以上分析可知σeq=7.4MPa远远小于290MPa,挡板满足应力和变形条件。
3 优化设计
因为出于安全考虑,初始方案选取挡板厚度为20mm,经分析计算可已看出最大应力远远小于许用应力,可以考虑减小挡板后度来减轻挡板质量,本文将挡板厚度减小为10mm,左挡板重量减少了2.57Kg,利用SolidWorks Simulation模块进行分析,应力及变形如图9(a,b)所示。
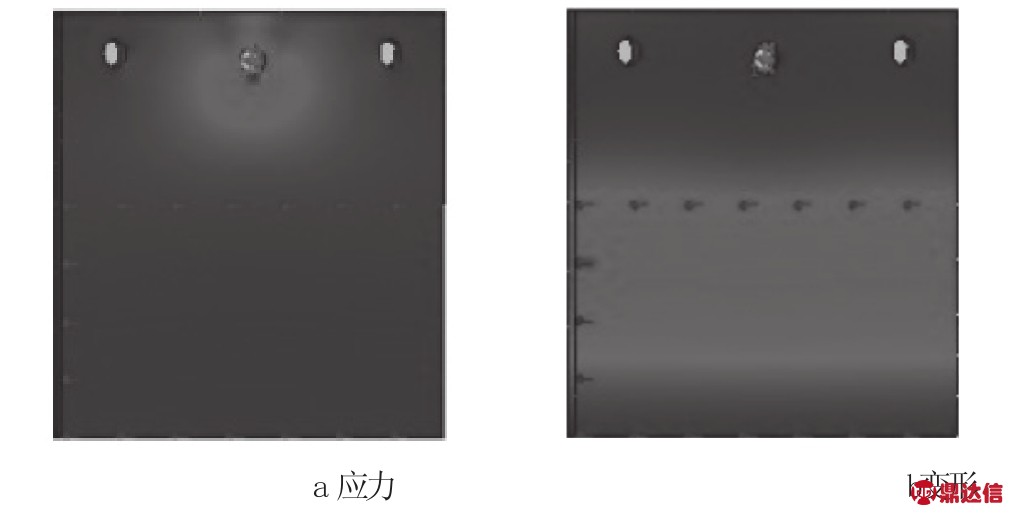
图9 应力及变形图
根据分析得到挡板的最大应力为26.2MPa,变形为0.49mm,均满足要求。
4 结论
本文通过SolidWorks建立码垛机械手末端执行器三维设计模型,并直接应用SolidWorks软件中的SolidWorks Simulation分析计算模块对码垛机械手末端执行器挡板进行了有限元静态分析计算和优化,分析计算结果表明挡板强度能够满足使用要求,并且进一步验证了本文提出采用SolidWorks建立三维数学模型,直接应用SolidWorks软件中的SolidWorks Simulation插件进行机械构件的有限元分析计算方法和步骤的正确性,提高了有限元分析的可靠性,以及实用性,对相关工程技术人员具有一定的参考价值。
1)SolidWorks Simulation软件与SolidWorks软件完全整合,当模型改变的时候,分析的数据库也会相应地自动更新,计算结果也能直接显示在SolidWorks模型上。避免了三维设计建模软件与分析计算软件之间的双项转换操作和数据转换缺陷等问题。
发现使用20 mL塑料注射器优于长颈瓶和投药器。该药呈糊状,每只山羊15~20 mL,如用长颈瓶灌服,洒落和粘在瓶壁的很多,灌进羊口腔内的仅有一半。而投药器有弯管,实际操作速度较慢,装药也麻烦。塑料注射器口径小,在灌服投药时,将羊的舌头压住,推入会厌部,又快又精准[3]。


