
【摘 要】随着计算机辅助设计技术的不读发展,各种三维设计软件已得以广泛应用,这为工程设计人员提供了一种有效的设计方法。SolidWorks软件因其功能强大、易学易用和技术创新等特点迅速得以推广,使得传统的机械设计逐步向三维设计转化。本文利用SolidWorks进行设计的基本过程和方法,完成了从三维实体造型到零部件的虚拟装配,设计出了一种码垛机器人机构的三维模型,并着重介绍了该款机器人的机械机构。为码垛机器人产品开发提供参考,相比传统的设计方式大幅度地提高了零件的设计水平和生产效率。
【关键词】SolidWorks 码垛机器人 机构设计
随着经济和科技水平的飞速发展,使得机器人在码垛行业有着更加广泛的应用。码垛是物流自动化领域的一门新兴技术,是将形状基本一致的物料按照一定的码放模式堆叠成垛,以实现物料的搬运、存储、装卸运输等物流活动[1]。
伴随着计算机应用技术的不断发展,通过CAD/CAE技术进行机器人机构设计,进一步解决在机器人设计、制造和运行过程中的问题,已经变成了一种实用高效的设计方法[2]。这样能够有效地减少设计修改,从而大大降低了设计成本, 提高了设计质量,同时缩短产品开发周期。
本文首先介绍了SolidWorks软件的强大功能,总结出了该利用该软件进行零部件设计的过程和方法,接下来着重介绍了基于该软件模式下设计的一种码垛机器人机构,为今后的码垛机器人研发工作提供了参考。
1 利用SolidWorks进行设计的基本过程和方法
由达索公司开发的SolidWorks是一款基于Windows操作平台的三维CAD系统,具有功能强大、易学易用和技术创新三大特点,使得SolidWorks 成为领先的、主流的三维CAD解决方案[3]。在软件中采用了全相关性设计技术,支持参数化和变量化技术,设计人员可以在设计的任何阶段对不满意之处进行修改,都可使装配体和零件之间相互驱动以完成相关部分的改变。提供了特征管理技术,通过特征树可以方便的管理设计过程并查询编辑设计的各个步骤零件,它还可以动态模拟零部件装配过程,它将2D绘图与3D造型技术融为一体,直接可以出满足生产和加工所需的二维工程图。利用SolidWorks进行设计的过程和方法,其流程图,如(图l)所示。
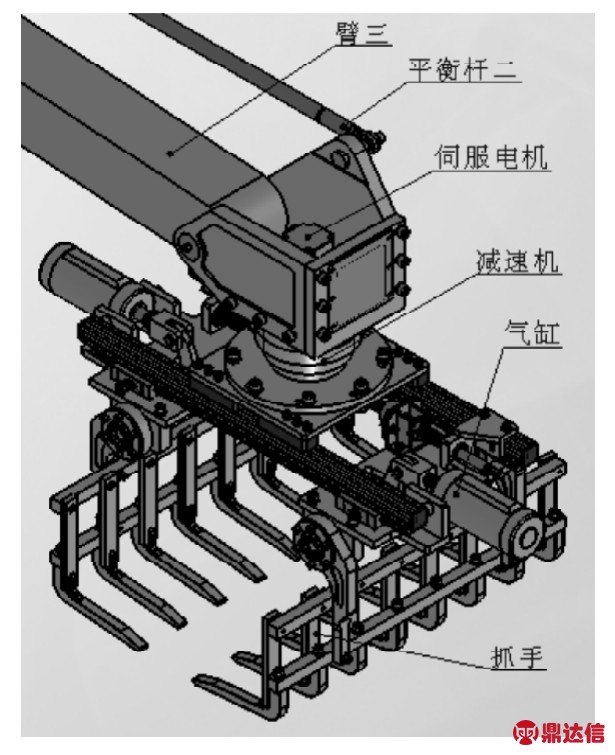
图1 利用SolidWorks进行设计的流程图
1.1 零件的三维造型设计和制作
零件的三维造型设计是SolidWorks软件的基本功能之一,它是一种基于零件特征的建模方式,对于同一形体的零件,往往会有多种建模形式,因此,在实际建模过程中,我们要设定合理的设计变量,以便于零部件在装配及优化时能够方便快捷地进行修改。
1.2 部件及整机的模拟装配
SolidWorks软件不仅能解决一般的零部件设计问题,还可以处理系统级的大型装配设计。在该系统下我们能清晰直观地看到零部件的三维实体模型和装配关系。SolidWorks的模拟装配功能是:在装配体模式下,将创建的零件三维模型按照零部件之间的连接方式及装配关系,添加相应的装配约束(如同轴、平行、重合等)进行模拟装配[4]。具体操作时可以将所需零部件全部或部分插入后依次装配,也可以插入一个装配一个[5]。
1.3 装配体的仿真运动及检测
零部件在之前的模拟装配过程中,SolidWorks已建立并记录了装配体各零部件之间的约束关系,使用该款软件所提供的动态仿真插件,我们可以清晰直观的查看装配体的所有运动,也可以使零部件按设定的约束条件来进行各种仿真运动,并且可以对运动的零部件进行动态的干涉检查和间隙检测[6]。这样可以使我们清晰直观地知道零部件之间是否有干涉等现象,以便于能及时发现问题并解决问题。
2 码垛机器人机构设计
我们所研制的码垛机器人是基于solidworks三维设计软件系统设计完成的,该款机器人的机械机构,如(图2)所示。其主体机械结构是基于平衡吊原理而设计的平面四连杆机构,具有承载力大、稳定性好、结构紧凑、节省能耗等特点[7]。该机构主要有四个自由度组成,在四台交流伺服电机控制作用下能够实现四种运动:腰部关节的旋转运动,后大臂上下运动,小臂前后运动和腕部的回转运动四种运动,这四种运动的组合可以完成在机器人三维作业空间范围内的物品搬运码垛任务。
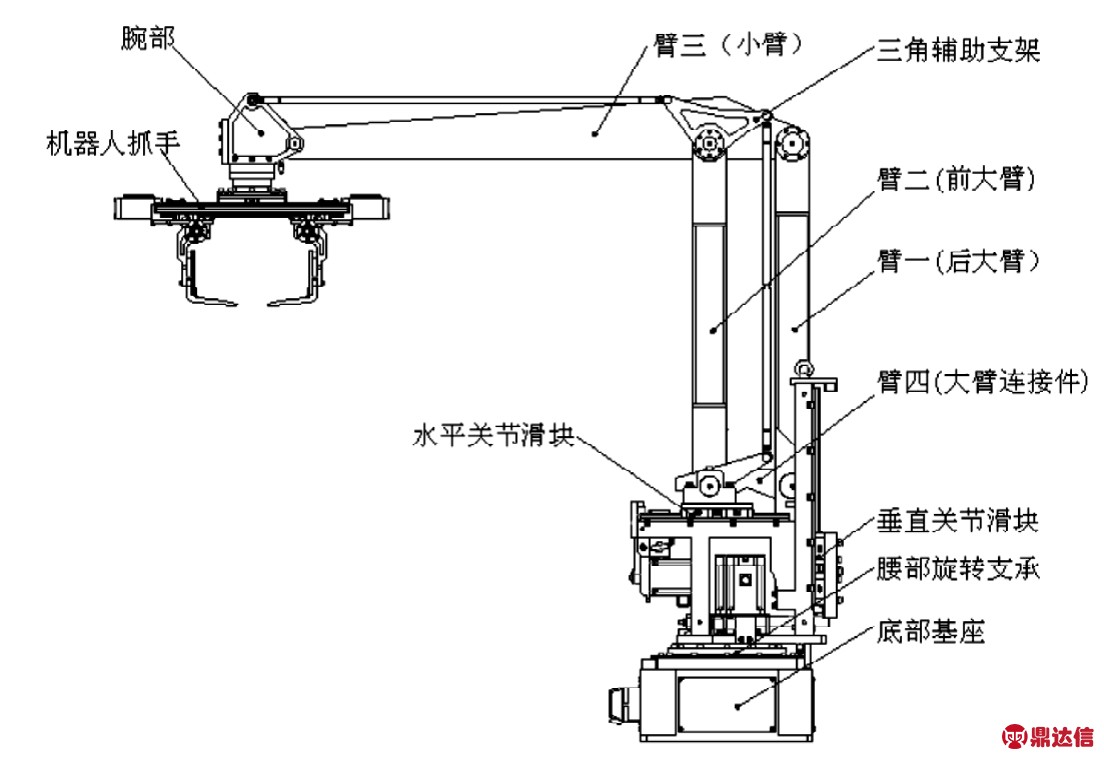
图2 总体机械结构模型
2.1 平行四连杆机构的设计
平行连杆机构机械构图,如图3所示。其主架体是由臂一、臂二、臂三、臂四组成的四连杆机构。为使末端执行器始终与地面保持平行,我们引入了平衡杆机构,即平衡杆一和平衡杆二,它们通过连接三角板相接,平衡杆一下端再连接到平衡杆支座上。这样抓手一经调平,在平衡杆的拉动下,即可始终处于水平状态。
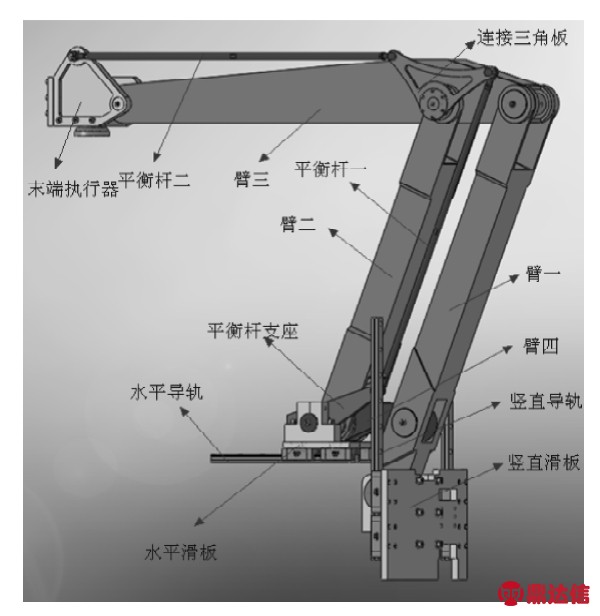
图3 四连杆机构图
为了能使水平滑板、垂直滑板能够沿各自方向往复滑动,在这里我们使用了导轨和滑块,滑板和滑块用螺钉相连,在动力的作用下,四连杆机构可实现在水平及竖直方向上的复合运动。它是怎么实现的呢,我们在下文的水平及垂直关节的机构设计中加以叙述。
2.2 水平及垂直关节的机构设计
水平及垂直关节的机械构图,如(图4)所示。水平和竖直滑块的移动带动臂杆做回转运动以分别带动末端执行器沿水平方向和垂直方向俯仰,实现这两个方向上的运动学解耦,且机构在垂直平面内形成一种放大机构[8],使其腕部在水平和垂直方向的位移仅分别于水平和垂直滑块的相对位移成正比关系,以便于运动控制和操作。

图4 水平及竖直关节的机械构图
在水平和垂直方向上,我们使用的是伺服电机通过同步带轮驱动动滚珠丝杠,滚珠丝杠上连接滑板,这样就使伺服电机的圆周运动通过滚珠丝杠变成了直线运动,进而实现了由四连杆组成的机械臂在水平和垂直方向上做相应的运动。
2.3 腰部底座的机构设计
腰部底座的机构图,如(图5)所示。该机构主要主要由底座、减速机、回转支承、回转主架体等零部件组成。其动力传递是:伺服电机所提供的动力由输入轴带动减速机的高速轴转动,其低速轴和底座上的连接法兰盘相固定,这样减速机的机壳就转变为了动力输出轴,经回转支承、联轴体后和回转盘相连,回转盘上安装的是回转主架体,从而使码垛机器人主架体实现了腰部的回转运动了。
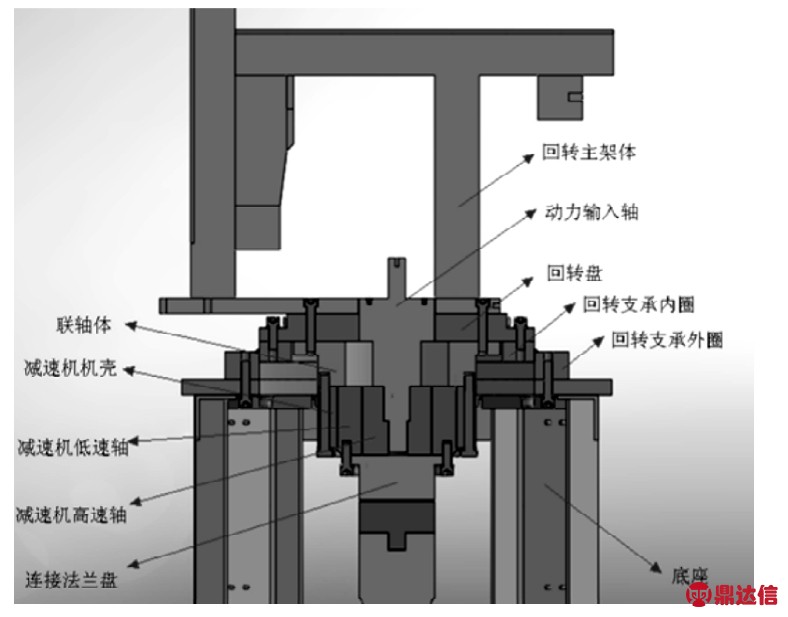
图5 腰部底座的机构图
2.4 机器人腕关节及抓手的设计
机器人腕关节及抓手的机构图,如图6所示。主要由连接与机器人小臂转轴的腕部支撑平台及作为末端执行器的抓手组成。在腕部机构中,伺服电机输出轴连接减速机,经减速增矩后能够使位于其输出法兰上的机器人抓手按设定程序自由旋转,从而实现腕部机构的回转运动。抓手的机构,是以托举为主、抓举为辅一种结构形式。该机构通过电磁阀控制左右两侧气缸活塞杆的伸缩,带动两侧手抓的张开与闭合,以完成码垛过程中抓放袋的工作任务。
图6 腕部关节及手爪机械构图
3 结语
本文首先简述了SolidWroks软件的强大功能,总结出了利用该款三维设计软件进行零部件设计的基本过程和方法,接下来着重介绍了使用软件设计的一种码垛机器人的机构,相比传统的设计方式大幅度的提高了零件的设计水平和生产效率。


