
1 引言
当今世界各地的现代化都市中,越来越多的高楼建筑都采用玻璃幕墙装饰,且逐渐成为现代都市建筑的一种象征。为了保证玻璃幕墙的清洁美观,同时解决人工清洗方式带来的工作条件危险、清洗效率低以及雇佣成本高等诸多问题,对全自动化高楼清洗机器人的研制提出了更高的要求。
目前在高楼清洗机器人的研发领域,对清洗机器人的吸附方式、移动机能和清洗机能研究较多,例如文献[1-4]研究了真空吸附、推力吸附和磁吸附等吸附方式;文献[5-7]研究了履带式、腿足式和多层框架式等移动方式;文献[8-10]研究了水射流清洗、机械力清洗、激光清洗等清洗方式;但针对不同高度的建筑楼层,由自然风力和建筑群体结构引起的空气动力学问题研究较少。基于FLUENT对在高空作业下的清洗机器人进行空气流体分析,并结合真空吸盘吸附方式,研制出了适合不同高度下的全自动清洗机器人,同时该机器人具有结构合理、操作简单和高空作业过程更加安全等特点。
2 总体方案设计
2.1 整机的原理
该新型高楼幕墙清洗机器人主要包括楼顶辅助机和清洗机两部分。机器人全局清洗幕墙运动与楼顶辅助机的运动相互结合,具有辅助机控制清洗机器人的升降、横向移位和壁面牵引移动等运动功能模块和清洗机控制旋转擦洗、平面擦洗、吸壁移步以及刮水等功能模块。整机采取空间多自由度的机械系统,结构紧凑,合理可靠,增加了工作的灵活性。整机的具体运动简图,如图1所示。
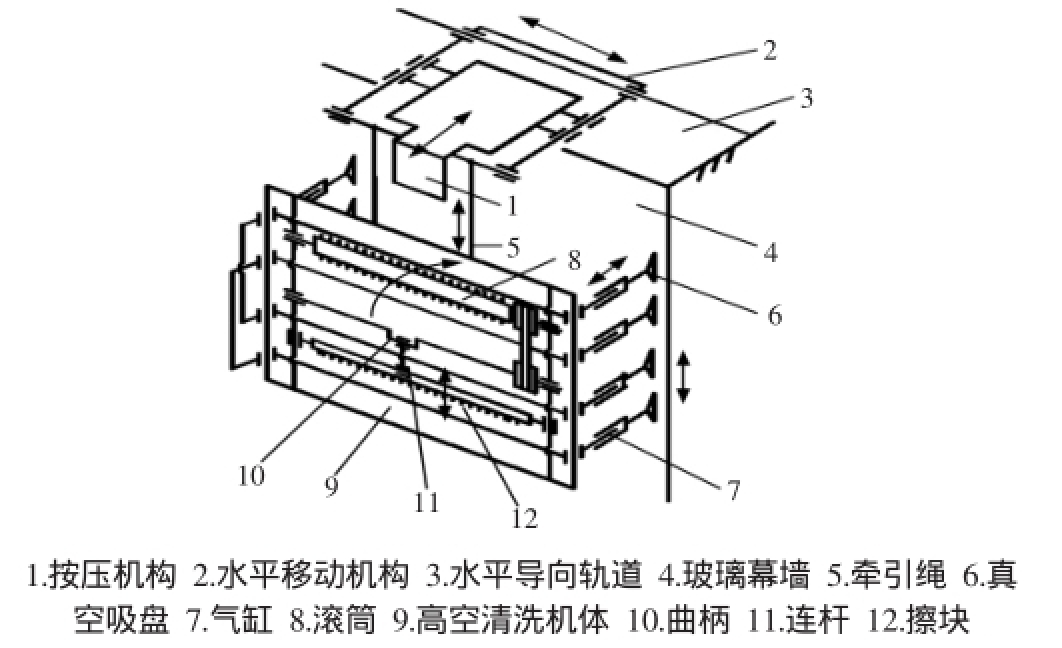
图1 清洗机器人的运动简图
Fig.1 The Motion Diagram of Cleaning Robot
整机动力源采用直流电机与气缸驱动方式;控制模块包括机械控制、电子控制和气动控制三个部分。具体工作过程为:清洗机器人开始清洗幕墙时,高空清洗机位于幕墙顶端一侧,在楼顶辅助机升降机构、同步带传动机构及曲柄滑块机构的共同作用下,使机器人内部的滚筒刷和平面刷实现竖直和水平方向双重清洗;位于机器人底部的两组吸盘,通过往复地吸壁及移步动作,实现了擦洗及擦洗速度的匀速控制。当清洗机器人运动到玻璃幕墙底端时,其位置信号被底端的传感器接收,单片机编程控制结束一列的玻璃幕墙清洗工作。此时真空吸盘气压释放,所有吸盘处于脱壁状态,弹性万向轮伸出,楼顶辅助机带动清洗机器人横向移动,移动结束后由楼顶辅助机升降机构牵引清洗机器人快速上升,当到达玻璃幕墙顶部时,上端的位置传感器接收并反馈信号,使楼顶辅助机停止向上牵引,此时机器开始另一列的清洗工作。上述工作过程不断循环、往复,最终达到幕墙完全清洗的目的。另外,清洗机上还设有刮水装置和污水回收箱,不仅可让幕墙不留水渍,而且避免了二次水污染,使幕墙清洗后变得更加清洁明亮。
2.2 移动机能
2.2.1 楼顶辅助机的移动控制
楼顶辅助机控制清洗机器人的升降运动、横向移动、纵向按压和壁面牵引移动等多种运动,其具体运动控制方式为:当机器人在竖直方向进行清洗工作时,利用楼顶辅助机内的单片机控制其在竖直方向上进行往复移位清洗;在清洗机器人结束竖直方向上的清洗工作后,通过楼顶辅助机水平运动控制清洗机器人水平移位运动,以实现对整个玻璃幕墙的全方位清洗工作。整个过程中,楼顶辅助机采用链传动方式完成对清洗机的水平控制。楼顶辅助机的运动控制,如图2所示。
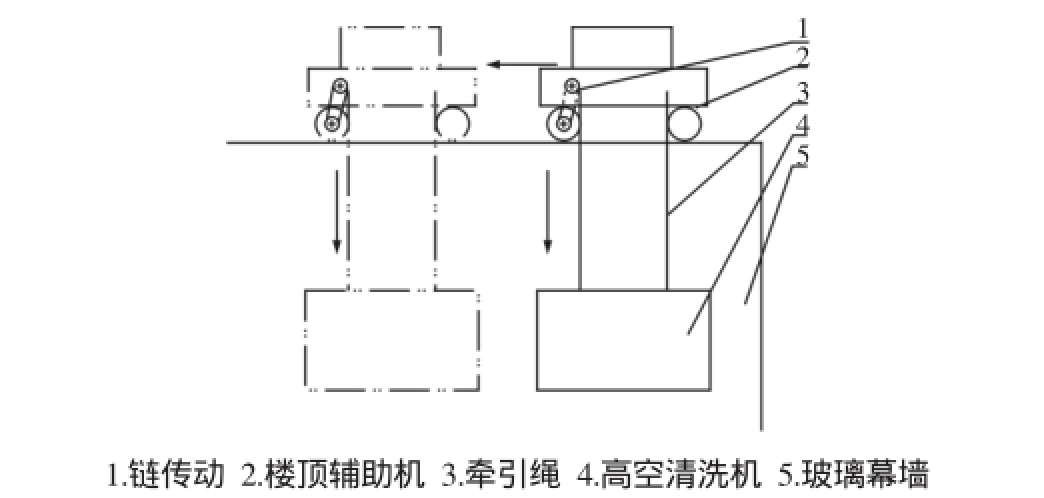
图2 楼顶辅助机的运动控制示意图
Fig.2 The Movement Control Schematic of Roof Auxiliary Machine
2.2.2 高楼幕墙清洗机器人的移动控制
高楼幕墙清洗机器人在玻璃幕墙上的水平与竖直移动功能的控制方式为:当清洗机器人进行竖直与水平方向移动时,由执行气缸和电磁阀联合控制的两侧弹性万向轮同时伸出,使擦块和吸盘脱离墙面,此时万向轮可沿着玻璃幕墙滚动,确保清洗机器人在楼顶辅助机控制下朝幕墙不同方位进行定向移动;在清洗工作过程中,由单片机控制的两侧万向轮自动收起,保证清洗机器人的正常工作。清洗机器人的的运动控制,如图3所示。
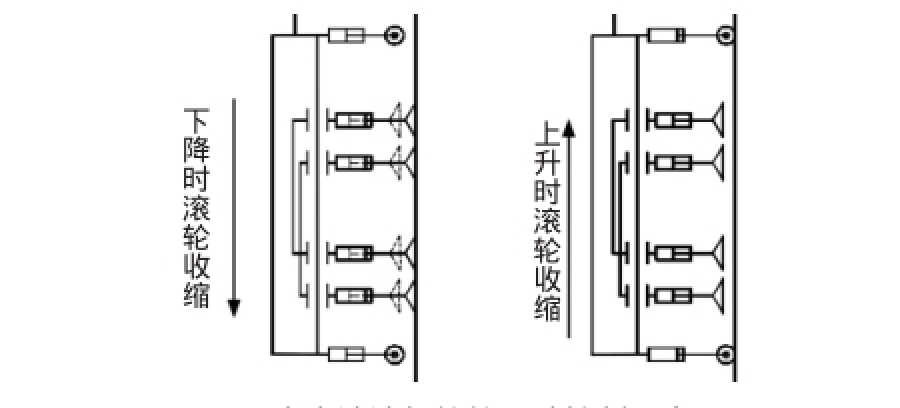
图3 高空清洗机的的运动控制示意图
Fig.3 The Movement Control Schematic of High Altitude Ceaning Machine
2.3 清洗机能
为提高机器人的清洗效率,本款新型高楼幕墙清洗机器人具备了一种集滚动刷擦洗、平面刷擦洗于一体的复合清洗的优点。其清洗机构原理,如图4所示。直流电机3通过联轴器4和圆锥齿轮机构5同时驱动曲柄滑块机构1与同步带轮6传动;胶棉擦块安装于滑块1上,以实现往复滑动擦洗运动;固连在从动带轮的滚筒8外表面装有特别缝制的高级棉布刷,经过上一道擦洗工序后,滚筒刷再次连续旋转擦洗。清洗机构原理图,如图4所示。

图4 清洗机构原理图
Fig.4 The Principle Diagram of the Cleaning Mechanism
2.4 吸附机能
为保证机器人在不同高度下工作的安全性,其吸附方式的设计变得尤为重要。本款新型高楼幕墙清洗机器人的吸附机能设计方案为:采用两副移动导轨和安装于底端两侧的八个真空吸盘,并由移动导轨保证机器始终吸紧幕墙,来实现机器人匀速下降的功能。八个真空吸盘的控制是通过气动回路和单片机程序来完成。使用行程开关限位装置和单片机程序控制方式,实现机器人的交替吸壁及移步功能。换步行走示意图,如图5所示。

图5 换步行走示意图
Fig.5 Change Walking Diagram
3 清洗机器人的安全性分析
清洗机器人在高空工作过程中,受自然环境因素影响较大,一般在恶劣自然环境中使用较少,因此忽略较为恶劣的自然环境因素,着重分析自然状态下空气流对此机器人工作安全性的影响。
新型幕墙清洗机器人的研制共采用八个真空吸盘,根据换步行走的设计要求将其分为两组。在清洗玻璃的整个过程中,真空吸盘产生的吸附力使清洗机器人始终保持着紧贴幕墙的状态。为保证清洗机器人在高空作业下的安全性,以下计算了不同高度下需求的真空吸盘尺寸。吸盘的尺寸受高空中风力大小影响较大,在工作过程中,吸盘和壁面不能发生相对移动,因此进行分析时将正常吸附状态视为静力平衡状态[11]。考虑到清洗机器人在高空工作时,迎风面受到的风力为最大影响外力,根据清洗机器人在迎风面下的最大倾覆力矩求得吸盘的适合尺寸,可保证清洗机器人安全、稳定的工作。计算分析机器人所受风力时,首先通过相关的经验公式进行理论推导,其次结合FLUENT软件模拟空气流对吸盘吸附力的影响环境,然后根据仿真结果与理论计算值进行对比验证,最终得出满足设计要求的真空吸盘尺寸,以保证新型幕墙清洗机器人工作过程的安全稳定。
3.1 高空作业所受风力的推导
风力等级估计风速公式[12]
高度为h1处的风速得出任意高度为h2处的风速:
机器人受到风压为:
吸盘受到的风力为
由以上公式,推导出风力公式:
式中:U—风速,m/s;F—风力等级;U1—高度为处的风速,m/s;U2—高度为处的风速,m/s;V—机器人附近最高风速,m/s;P—风压,kg/m2;A—物体垂直于风向的迎风面积,m2;f—物体所受的压力,N;G—重力加速度,9.8m/s2。
假定机器人10m处受到的最高风力等级为5级(蒲氏风力等级表),机器人迎风面积A为1m2,由以上公式计算可得50m处的风力大小为102.6N,100m处的风力大小为135.3N,150m处的风力大小为159.2N。
3.2 FLUENT流体仿真分析
3.2.1 模型的简化与建立
为了保证全面准确的反映清洗机器人复杂的实体外形特征,同时使复杂的三维实体模型得到合理简化,在不影响所要求的分析精度下,对清洗机器人三维实体模型进行了适当的简化;将一种方便空气流对清洗机器人产生作用力的外形替代原清洗机器人的复杂外形模型;并直接使用GAMBIT软件进行此二维模型绘制。风力作用下的简化二维模型,如图6所示。这样可以减少计算时间,提高计算效率,同时保证了分析精度。
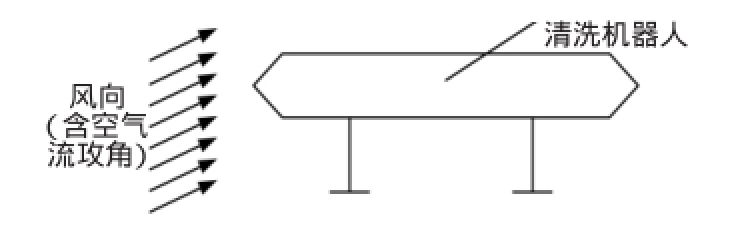
图6 清洗机器人二维模型
Fig.6 The Cleaning Robot Two-Dimensional Model
3.2.2 网格划分
计算域建模完成之后,利用ANSYS对模型进行网格划分。网格化时采取四面体网格划分,为了划分比较整齐的结构化网格,必须将计算区域分割成两个部分。在靠近机器人侧面附近区域,则加密网格划分,在远离机器人侧面则网格较稀疏,网格划分效果,如图7所示。
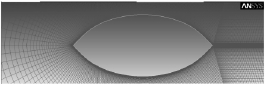
图7 网格划分效果图
Fig.7 Mesh Rendering
3.2.3 仿真各参数及边界条件的设定
仿真中采用空气为默认流体,考虑到流体的压缩效应和热物理特性随温度变化,仿真中采用Sutherland定律求粘性,即:
式中:μ—对应温度下的空气粘度;μ0—对应于参考温度下的参考粘度;TS—萨瑟兰常数。
对于可压缩流体,习惯将物性设为随温度而变化,为了简化模拟,将热传导率和定压比率设为常数;同时将工作压力值设为101325。将计算域的任意一侧设为速度进口边界条件,将清洗机器人的上、下两个任一侧面设置为受力的边界条件,同时设置压力远场边界条件,仿真选择pressure-far-field边界类型,设定马赫数为0.20,流体的初始攻角设为0°,每次以5°增加,当攻角设置为90度时停止整个计算过程。
3.2.4 仿真求解
在攻角从0°逐渐变化至90°的仿真过程中,每次求解计算时设置迭代步数为5000次,迭代达到默认收敛标准后停止。
3.3 仿真结果及分析
根据设定的各种边界条件及调研目前都市高楼建筑群的高度特征的情况,仿真过程中选取50m的高度特征,在此高度下,通过FLUENT模拟,每次记录清洗机器人在不同的攻角侧面受到风力值大小,具体,如表1所示。由表1的结果数据清晰的得出:清洗机器人在不同攻角下所受的风力值大小;在攻角为60°时,侧面受到的风力最大,其最大值大小为112.56N,同时绘制得出侧面所受风力随攻角的变化曲线图。具体,如图8所示。
表1 不同攻角下所受的风力值
Tab.1 Wind Force at Different Angles of Attack

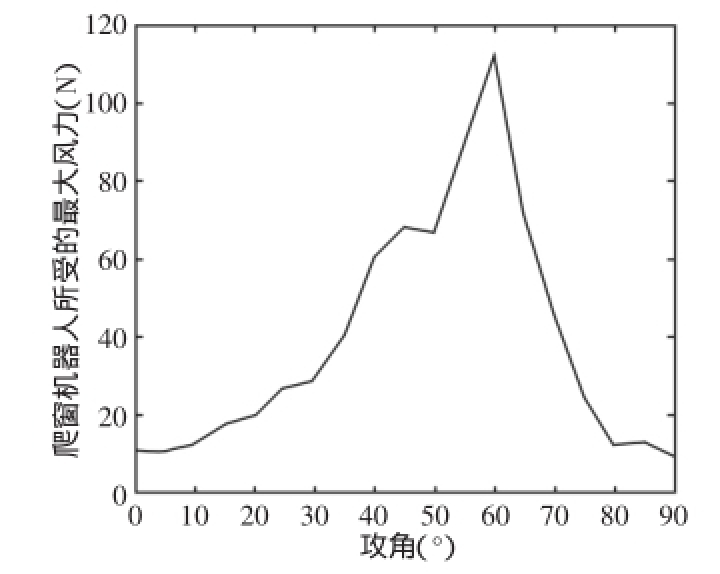
图8 侧面所受风力随攻角的变化曲线
Fig.8 Side by Wind Power Curve Along with the Change of Angle of Attack
由图8得出:在不同的攻角风力作用下,清洗机器人迎风面受到最大风力呈现出单峰状规律,由此可见自然风对清洗机器人在幕墙上工作时会产生不利的影响,同时给出仿真计算过程中的计算残差图,取受到最大风力下的计算残差图,具体,如图9所示。
图9 所受最大风力的计算残差图
Fig.9 The Calculated Residuals of the Maximum Wind Force
由图9的计算残差图表明其仿真结果的可靠性高。因此在设计研制此清洗机器人时,须充分考虑其高空作业下的安全性,这样有助于研制出工作更为安全的清洗机器人。
3.4 实际所需吸盘的安全尺寸
根据FLUENT仿真分析结果,并结合经验公式计算值,对比得出两者的计算结果基本相符,因此根据最大倾覆力矩得出每个吸盘最小的吸附力。设机器人在不同高度下受到的风力为F1,在最大风力影响方向上取仿真分析结果和经验公式计算结果中较大的值,设一组吸盘正常工作时产生的真空吸附力为F2和F3,机器人所受风力到机器人对称中心的力臂为L1,吸盘正常工作时产生的真空吸附力到对称中心的力臂分别为L2和L3,根据样机尺寸,L1取值为0.5m,L2、L3取值均为0.3m。
根据力矩公式,得出在高楼建筑特征在50m高空处,每一个吸盘须产生的最小为85N的真空吸附力;在100m高空处,每一吸盘须产生最小为112.7N的真空吸附力;在150m高空处,每一吸盘最小须产生152.2N的真空吸附力,由此才可确保清洗机器人在不同高度中遇到强风时始终保持正常的工作状态。则真空吸盘的直径为:
式中:P—吸盘的真空压强,根据实际情况取得0.5MPa;F—单个吸盘的真空吸附力,N;A—吸盘的有效面积,一般取吸盘实际面积的80%,mm2;D—吸盘的实际直径,mm;S—安全系数,取值2。
代入初始数据:解得50m处吸盘直径D1=23.26mm;100m处吸盘直径D2为26.7mm;150m处吸盘直径D3=31.1mm。根据吸盘的规格标准[12],选取吸盘直径D1应选取直径为30mm的真空吸盘;吸盘直径D2应选取直径为30mm的真空吸盘,吸盘直径D3应选取直径为40mm的真空吸盘,则可以满足清洗机器人在不同高度时的设计要求。
4 实验验证
根据设计方案和数值计算结果,制作出一台适用于50m以下幕墙高度的原型样机,外观,如图10所示。
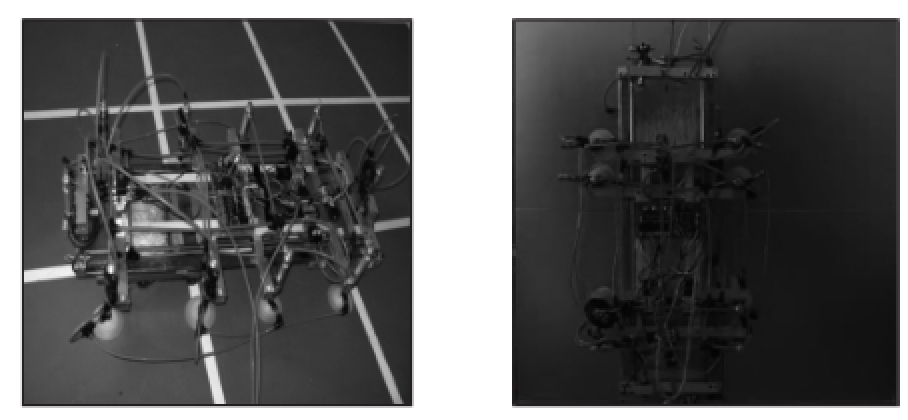
图10 原型样机图
Fig.10 Prototype Diagram
对此原型样机进行室外模拟全自动清洗工作过程。下面设置实验条件:(1)由于受场地限制,整个实验过程在高度50m以下的玻璃幕墙进行;(2)结合文中安全性计算与FLUENT仿真模拟50m以下的自然风环境得出的机器人侧面受到的风力,采用吸盘的安全直径大小为30mm;(3)为了防止天气风力大小的偶然性,室外模拟实验时间为多天连续。
实验结果:经过多天的室外实验模拟观察,原型样机工作安全,没有发生掉落现象,同时发现此原型样机清洗面积速度达到0.3m2/s;在实现复合式清洗功能提前下,此机器人的清洗部位始终对幕墙保持了恒定的压紧力。另外,原型样机可对洗涤污水进行收集,减少水源浪费。样机上安装的高清摄像头和单片机模块可同步观察和控制整个实验过程,以保证清洗效果。通过原型样机实验结果,进一步验证了机器人在清洗幕墙时能够按照预定的程序完成各项规定动作,并能实现稳定、安全、高效的清洗工作。
5 结语
针对高层建筑玻璃幕墙引发的清洗问题,研制了一款新型高楼幕墙清洗机器人,并通过对清洗机器人的工作稳定性计算分析得出以下结论:(1)根据现有清洗机器人的结构特点,结合了本清洗机器人移动、清洗和吸附三个方面机能对其进行设计,其多自由度的空间结构保证了运动的灵活性;(2)利用FLUENT模拟自然风环境,对新型清洗机器人中的真空吸盘的尺寸大小进行校核,保证了清洗机器人高空作业的安全性;(3)根据经验公式推导得出所需真空吸盘的大小,与FLUENT仿真结果对比,最终得出真空吸盘的直径尺寸,使该清洗机器人能够适应于多高度的楼层建筑;(4)通过制作原型样机实验验证了模拟仿真结果的正确性;同时发现这款新型清洗机器人兼具清洗效率高、操作方便灵活、自动化与实用化程度高等性能特点,为今后此类机器人的研制提供了参考价值。
参考文献:
[1]张兆君,颜宁,宗光华.壁面吊挂清洗机器人真空吸附力和牵引力设计研究[J].机器人,2005(1):57-62.(Zhang Zhao-jun,Yan Ning,Zong Guang-hua.Research on design method of vacuum sorbing and pulling forces of wall-suspending cleaning robot[J].Robot,2005(1):57-62.)
[2]陈勇,王昌明,包建东.新型爬壁机器人磁吸附单元优化设计[J].兵工学报,2012(12):1539-1544.
(Chen Yong,Wang Chang-ming,Bao Jian-dong.Optimization of a novel magnetic adsorption unit for wall-climbing robot[J].ActaArmamentarii,2012(12):1539-1544.)
[3]袁夫彩,陆念力,曲秀全.水下船体清刷机器人磁吸附机构的设计与研究[J].中国机械工程,2008(4):388-391.
(Yuan Fu-cai,Lu Nian-li,Qu Xiu-quan.Design and study on magnetic absorbing machine of underwater robot for cleaning hull[J].China Mechanical Engineering,2008(4):388-391.)
[4]袁夫彩,陆念力,尹龙.基于液动的水下船体清刷机器人的研究[J].机床与液压,2008(6):14-16.
(Yuan Fu-cai,Lu Nian-li,Yi Long.Study of cleaning robot for under watership hull based on hydraulic transmission[J].Machinetool and Hydraulics,2008(6):14-16.)
[5]蔡长亮.基于Pro/E与RecurDyn的履带式管道清洗机器人的联合仿真[J].制造业自动化,2014(21):53-56.
(Cai Chang-liang.Simulation of the tracked duct cleaning robot based on Pro/E and RecurDyn[J].Manufacturing Automation,2014(21):53-56.)
[6]徐东,杨鸣凯,齐文.竖直玻璃幕墙清洗机器人的设计[J].中国科技信息,2011(8):176+183.
(Xu Dong,Yang Ming-kai,Qi Wen.The design of the vertical glass curtain wall cleaning robot[J].China Science and Technology Information,2011(8):176+183.)
[7]刘莹,申超,邵泉钢.中央空调管道式通风系统清洁机器人[J].机械科学与技术,2011(3):435-439+443.
(Liu Ying,Shen Chao,Shao Quan-gang.A cleaning robot for the pipe ventilation system of a central air-conditioner[J].Mechanical Science and Technology for Aerospace Engineering,2011(3):435-439+443.)
[8]刘季霖,童章谦,付婧媛.水射流抽气式清洗机器人[J].液压与气动,2009(10):42-45.
(Liu Ji-lin,Tong Zhang-qian,Fu Jing-yuan.Water fluidic cleaningrobot[J].Chinese Hydraulics and Pneumatics,2009(10):42-45.)
[9]唐伯雁,窦蕴平,高振莉.幕墙清洗机器人的清洗系统设计[J].机器人技术与应用,2007(2):43-45.
(Tang Bo-yan,Dou Yun-ping,Gao Zhen-li.Curtain wall cleaning robot cleaning system design[J].Robot Technique and Application,2007(2):43-45.)
[10]施曙东,李伟,易三铭.从激光清洗专利看激光清洗技术的发展[J].清洗世界,2009(9):26-33+42.
(Shi Shu-dong,Li Wei,Yi San-ming.To see the development of laser cleaning technology from laser cleaning patent[J].Cleaning World,2009(9):26-33+42.)
[11]田静眉.真空吸附式壁面清洗机器人结构设计与研究[D].成都:西南交通大学,2013,22-25.
(Tian Jing-mei.Research on the mechanical structure of vacuum adsorb style wall-cleaning[D].Chengdu Southwest Jiaotong University,2013,22-25.)
[12]郭秀丽.新型载体高楼壁面清洗机器人[D].天津:天津大学,2005.


