
铁路运营隧道的衬砌状态检测对铁路部门掌握隧道衬砌的病害有着至关重要的意义。目前隧道衬砌状态检测手段主要有2种:传统人工手检与隧道检测车等大型机械化设备检测[1-2]。本文介绍一种全新的检测手段,通过爬壁机器人装置搭载地质雷达对隧道衬砌进行检测,用于分析隧道衬砌背后的缺陷情况。爬壁机器人最主要的一个特点是机器人可以克服重力作用,在一定倾斜度、垂直或倒立的壁面上具有静止及移动的能力[3]。目前爬壁机器人吸附方式主要包括磁吸附、负压吸附、螺旋桨推压等。近年来又出现了胶吸附、仿壁虎足的干吸附、仿蜗牛的湿吸附、类攀岩抓持、毛刺抓持等方式[4]。
1 爬壁机器人结构设计
由于隧道表面为混凝土墙面,而鼎达信海绵吸盘负压吸附具有适用面广,不受墙壁表面材料限制,集成度高的特点,因此在隧道内适合采用真空负压吸附方式。隧道表面具有一定的曲率特征,不同隧道的曲率半径存在差异,吸附时不仅需要保证吸附过程的稳定性,还要能够适应不同隧道的表面及隧道不同部位曲率半径的变化。因此吸附装置采用材料适应性强、密封性好的海绵真空负压吸盘,且为了保证吸附的稳定可靠,宜采用多吸盘式结构[5-6]。当机器人在隧道上爬行时,能够很好吸附在粗糙的表面,同时通过吸盘接口处15°范围内的弹性单向摆动轴可以很好适应隧道表面曲率的变化。
爬壁机器人的行走方式主要分为车轮式、履带式、多足步行式和框架式4种。隧道衬砌检测需要机器人能携带地质雷达稳定平稳地运动,否则会影响检测效果;同时应最大程度减小系统控制上的复杂性,保障吸附的稳定性。框架式的机器人自由度低、结构简单,可使控制方式便捷,而且走行和吸附转换动态特性稳定。虽然对壁面曲率的适应性逊于多足式机器人,但通过对框架的足部做相应的技术处理可以较好弥补这一缺憾。本爬壁机器人采用十字形框架式结构,即机器人外形轮廓与平面直角坐标相似,关节轴线相互垂直,相当于笛卡尔坐标系的X轴和Y轴,2个关节都是移动关节[7]。X轴和Y轴主要由同步带和导轨实现移动功能,机器人在隧道衬砌表面爬行靠X轴和Y轴的交替运动来实现。爬壁样机(含地质雷达)结构见图1。
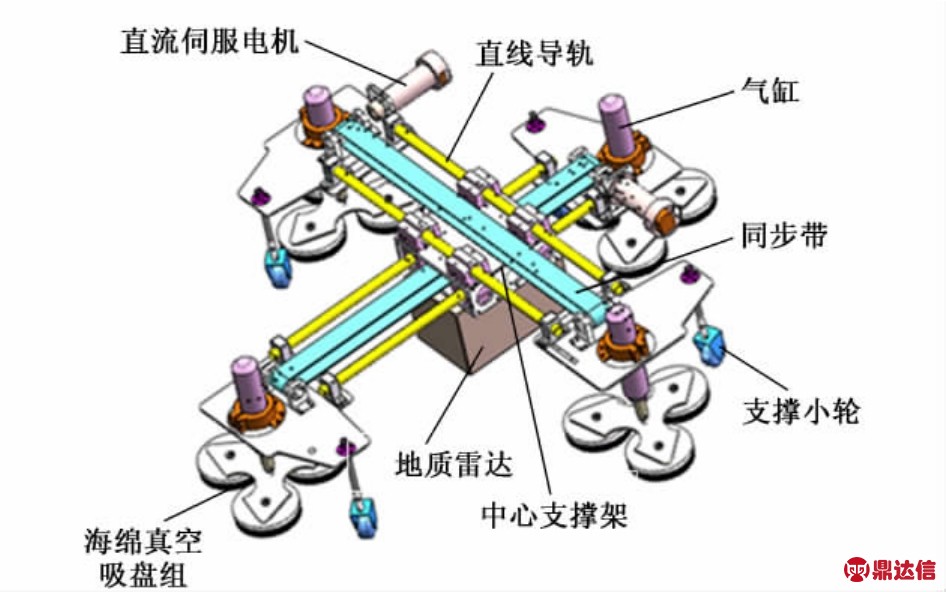
图1 爬壁样机(含地质雷达)结构
2 样机控制系统设计
控制系统主要根据机械系统中的执行机构运动学特性来设计[8]。机器人各项功能主要通过电机带动同步带运转、电磁阀控制气路开闭、气缸伸缩、无线遥控器发送指令来实现,并配备多个状态显示LED灯。
控制系统运行流程见图2。
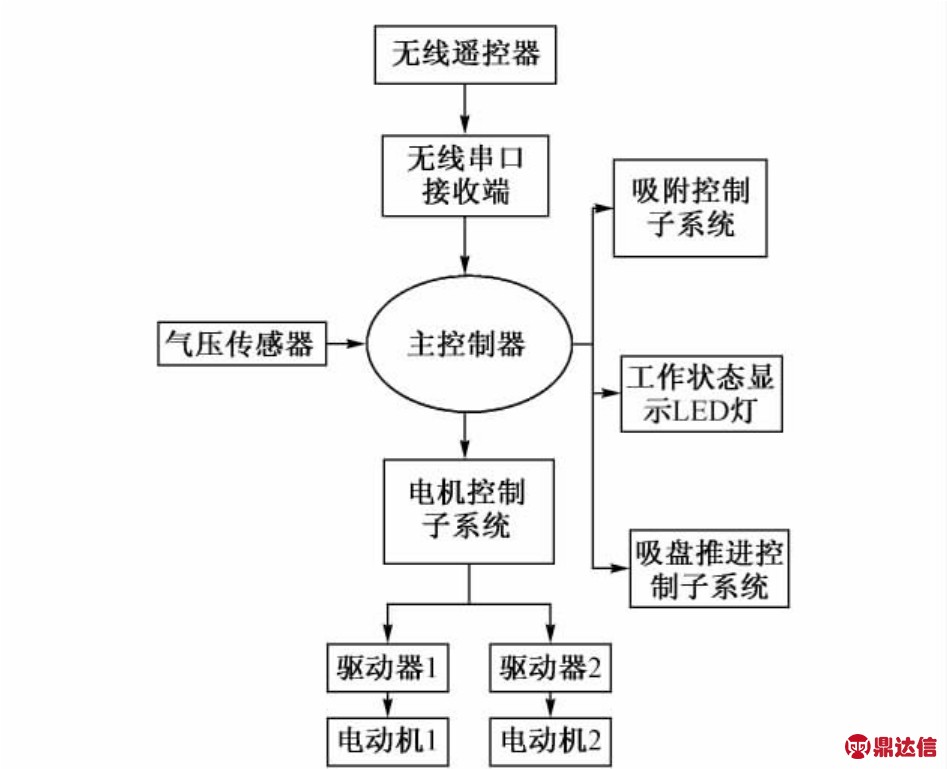
图2 控制系统运行流程
吸盘和气缸的气路控制示意如图3。空气压缩机首先产生高压气体,经过过压保护阀、总阀门、流量控制阀、油水分离器、压力表之后分成两路,分别作为吸盘吸附和气缸伸缩的空气动力源。在吸盘吸附控制模块当中,气体经过串联的电磁阀、真空发生器、气压传感器和过滤器到达各组吸盘,各组吸盘之间的吸附与释放状态互不干涉。
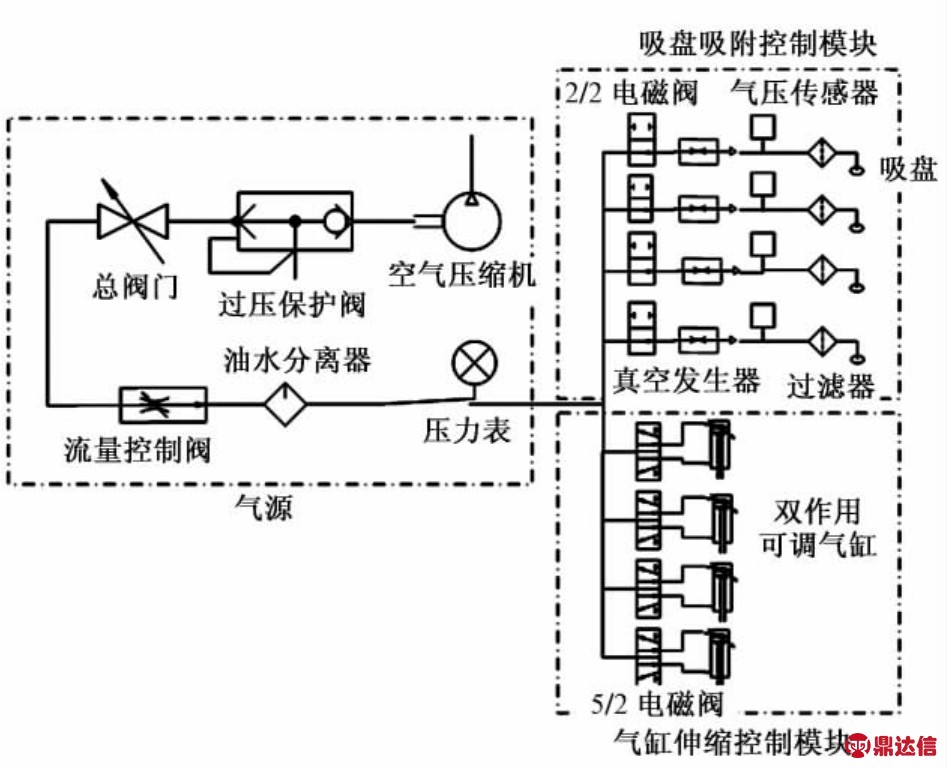
图3 吸盘和气缸的气路控制示意
吸盘的气路也包括通、断2种状态,接通电源时为关闭状态,断开电源时为打开状态。打开时能够吸附。这种设计思路可以在断电等异常状态发生时,保证机器人样机的安全。控制吸盘电磁阀的电源通、断采用1组继电器完成,由主控制板输出1组触发电平即可实现电磁阀的通、断。X轴方向上的2组吸盘的控制状态同步,Y轴方向上的2组吸盘的控制状态也是同步的。
3 检测作业安全测试
爬壁机器人能否完成爬壁作业,关键在于可否在对应工况下安全稳定吸附。对此需要进行测试。
测试方案:机器人的4只脚都采用等边三角形布置,在机器人实际爬行的过程中不可避免地会出现一个问题,即三角形可能呈上三角或者下三角状态。当吸盘呈上三角形布置时,下面2只吸盘均承受压力,上面1只承受拉力。当吸盘呈下三角形布置时,下面的1只吸盘承受压力,上面的2只均承受拉力。从理论分析来看,上三角姿态更易使机器人倾覆。同时,机器人在隧道衬砌表面走行时,接触面与水平面形成的角度θ是一个变化量,其变化范围为0°~90°,如图4所示。对不同倾斜角度的吸附可靠性需要进行测试分析。
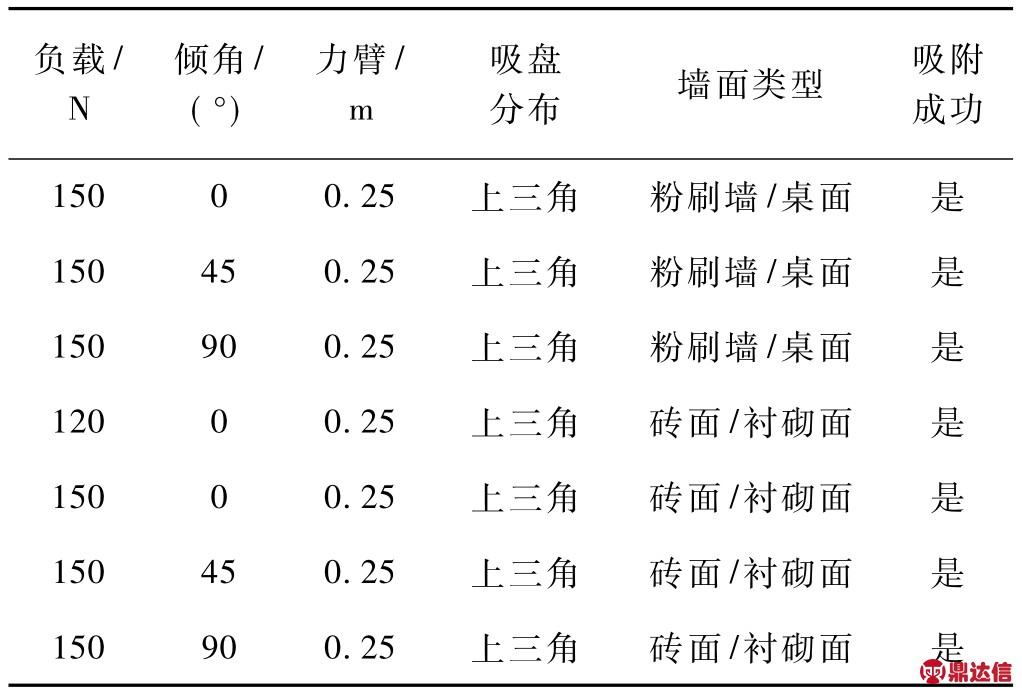
图4 倾斜接触式吸附示意
此外,吸盘是否会从墙面脱落除了跟机器人本体质量有关外,机器人的重心到墙面的距离也是一个很重要的因素,即需要克服设备对吸盘产生的弯矩。
机器人携地质雷达总质量不超过30 kg,形成对机器人本体有害的等效力臂不足0.15 m,每次动作时共有2组吸盘处于吸附状态,理论上任何工况下每组吸盘承担一半负载即可实现吸附。在试验中,施加150 N的载荷,依次改变与墙面的倾斜角度,并采用更易倾覆的上三角方式对吸盘进行布置。经实测,吸盘在表面质量较好的衬砌表面和粗糙不平的砖面均能实现可靠吸附。为保证一定的安全系数,试验力臂设定为0.25 m。试验数据及结果见表1。
分析表1可知:采用上三角分布方式、海绵真空负压吸盘与被测面接触时成功吸附,并无倾覆等失效现象,所选空气压缩机和真空发生器满足系统要求,吸盘与接触面成不同夹角时对稳定气压值的影响很小。
表1 吸盘吸附试验数据及结果
4 负载地质雷达整机试验
4.1 试验情况
综合考虑雷达硬件能力、轻量化和便捷性,地质雷达设备应质量轻、高度低、体积小,探测深度与分辨率满足隧道衬砌探测要求,可无线WIFI传输采集的数据。选择主机天线一体化CAS-S800地质雷达。该雷达内置800 MHz屏蔽天线,隧道衬砌等混凝土材质探测深度0.5~0.9 m,被测介质的最大深度可达1.5 m。测量时窗40 ns,采样点数512,因爬壁走行方式并不能保证无间歇连续移动,故触发方式选择距离触发。
本次试验在中国铁道科学研究院东郊分院环形铁道试验线隧道进行。隧道较长,不运营,仅供开展试验所用。抽测部分区段(隧道洞身标0~31 m)。
试验在右边墙、左边墙(距轨面1.5 m)布置2道测线。通过遥控方式操作爬壁机器人爬到对应的测线位置,再操控机器人沿着大里程方向推进(见图5)。数据采集员即时在笔记本电脑的采集软件上做位置标记。当检测工作结束后,采用手持地质雷达的方式对左边墙测线进行复核。
4.2 结果与分析
地质雷达接收的是来自不同介质界面的反射波,根据雷达波形图进行结果判读。结果解释的准确性取决于合理选择检测参数、数据处理方法得当、判图经验丰富等因素[9]。
依据有关规定,对隧道衬砌空洞、衬砌背后密实度等情况进行等级评定[10-11]。该隧道检测区段衬砌缺陷统计结果见表2。
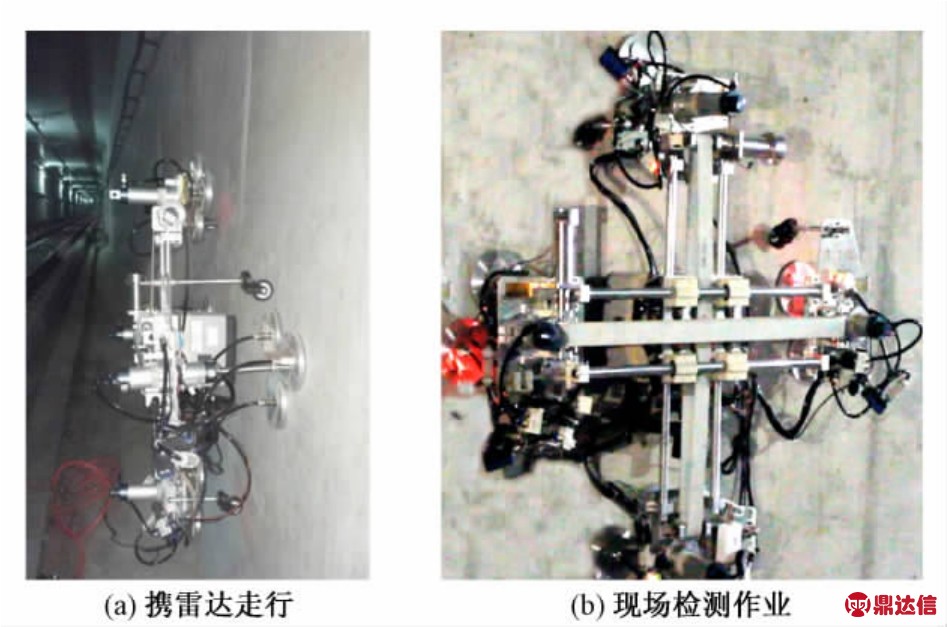
图5 爬壁机器人试验现场
表2 隧道检测区段衬砌缺陷统计结果
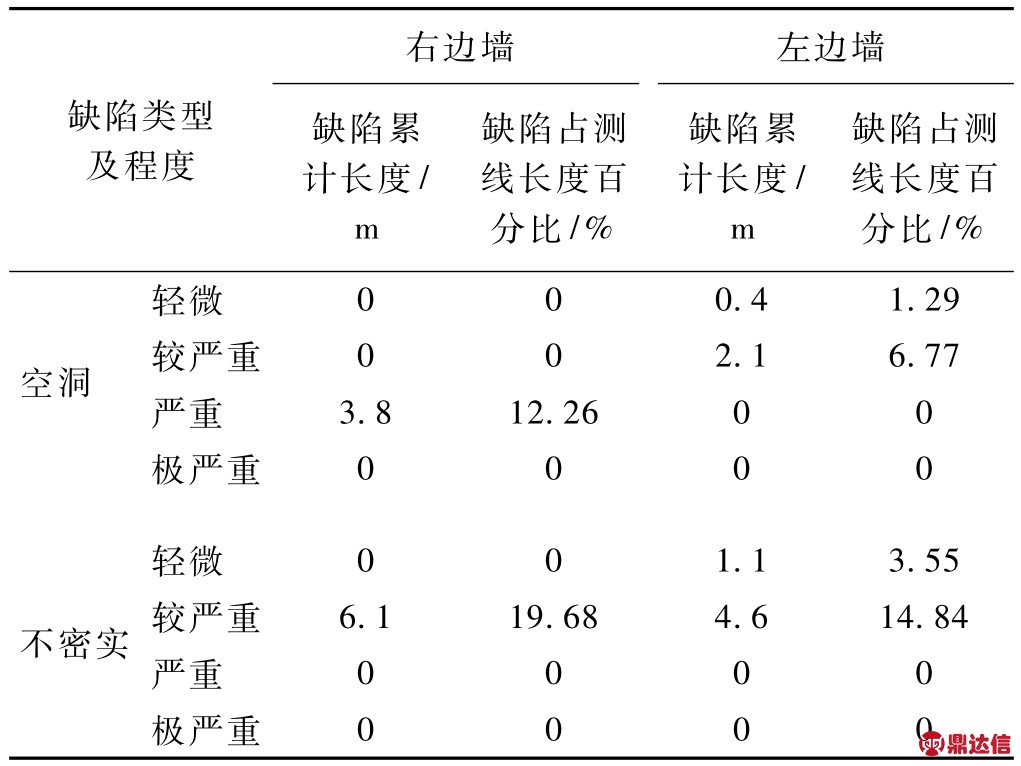
注:缺陷累计长度为同一测线、相同等级缺陷测线长度的累计值。
分析表2可知:
1)右边墙测线衬砌内部及背后空洞1处,累计长度约3.8 m,占测线长度的12.26%;不密实1处,累计长度约6.1 m,占测线长度的19.68%。其中空洞缺陷达到严重程度。
2)左边墙测线衬砌内部及背后空洞2处,累计长度约2.5 m,占测线长度的8.06%;不密实2处,累计长度约5.7 m,占测线长度的18.39%。
隧道左边墙人工复核结果:衬砌内部及背后空洞2处,不密实2处。与爬壁机器人检出的缺陷数量相同,位置相同。
5 结论与建议
1)采用爬壁机器人可在20 m距离内利用遥控方式实现爬壁走行,可以有效操控检测装置到达需要检测的目标部位。机器人作业为小型机械电子化作业,可减少烟尘、噪声等环境污染,大幅度降低对人体产生的伤害。
2)爬壁机器人利用海绵真空负压吸盘作为关键吸附件,每个吸盘组由3只吸盘组成,使得单个吸盘组在90°范围内0.25 m力臂作用下负载可达150 N,并能吸附砖面、石材面、混凝土面等粗糙表面。通过吸盘与气缸连接处的铰接使得机器人在走行推进过程中在一定表面曲率范围内具有较好的适应能力。
3)爬壁机器人检测与人工手持地质雷达检测这2种方法对衬砌内部及背后空洞和不密实缺陷的检出数量相同,位置亦相同。
应用遥控爬壁样机进行衬砌状态检测这种新技术虽具有较大挑战性,尚需完善,但它具有很大的发展潜力。该技术比较适用于人力及大型机械装备较难作业的局部区段检测或隧道衬砌缺陷抽检。
参考文献:
[1]吴波鸿,白雪冰,孔祥春.探地雷达在隧道衬砌质量检测中的应用[J].物探与化探,2008,32(2):229-231.
[2]王伟,魏永久,崔高峰,等.隧道限界检测列车动态标定技术的研究与设计[J].电子测试,2013,4(7):24-26.
[3]雷洋.隧道衬砌检测中的无线遥测装置[J].铁道知识,2015(4):54-57.
[4]王家斌.壁面移动机器人吸附方式的研究现状与发展[J].机械,2012,39(1):1-5.
[5]高学山.应用于爬壁机器人的反推力与负压力复合吸附方法及其实现:中国,ZL200810227554.X[P].2009-04-22.
[6]吴善强.低噪声负压爬壁机器人系统的研究[D].哈尔滨:哈尔滨工业大学,2007.
[7]吴神丽.新型高楼清洗爬壁机器人的研究与设计[D].成都:成都理工大学,2009.
[8]CUI Dengqi,LEI Yang,CHEN Dongsheng,et al.Safety Analysis of a Climbing Robot with Dual Pumps for Building Surface Detection[C]//IEEE International Conference on Mechatronics and Automation.Harbin:Institute of Electrical and Electronics Engineers Incorporated Company,2016:508-513.
[9]雷洋.隧道状态检查车哈尔滨局隧道检测报告(嫩林线、塔韩线)[R].北京:中国铁道科学研究院,2015.
[10]中华人民共和国铁道部.TB 10223—2004 铁路隧道衬砌质量无损检测规程[S].北京:中国铁道出版社,2004.
[11]中华人民共和国铁道部.铁运函[2004]170号 铁路运营隧道衬砌安全等级评定暂行规定[S].北京:中国铁道出版社,2004.


