
摘 要:为了实现机载小型化FSM的闭环控制,设计了一款小体积、高精度、高环境适应性的微位移测量传感器。首先根据位移传感器的技术原理和机载FSM的应用需求,提出了微位移测量传感器的主要设计指标。然后,分别对微位移测量传感器的发光元件、密珠滑轨、测量光栅和接收元件等进行了详细设计与选择。其中,高精度密珠滑轨的采用不仅减小了测量过程中的附加阻力,而且使光栅副的运动更加精准;光栅副通光窗口的引入、独特零件编码的设计、裂相法信号提取方式的采用,保证了微位移测量传感器的高低温性能。最后,针对微位移测量传感器在机载小型化FSM上的应用效果进行了理论分析与实验检测。结果显示:机载小型化FSM的方位指向误差不超过3.4",俯仰指向误差不超过3.8",证明了专用型微位移测量传感器高精度、高分辨力和高响应速度的技术特点,满足机载小型化FSM的应用需求。
关键词:快速反射镜;位移传感器;测量光栅;增量式
1 引 言
快速反射镜(fast steering mirror,FSM)作为精确控制光束传播方向的精密光学装置,具有响应速度快、指向精度高和角度分辨力大等突出优点。目前已被广泛应用于天文望远镜、激光通讯、图像稳定、自适应光学和精密跟踪等领域[1-5]。
为了实现FSM的闭环控制,需要对反射镜的位置进行实时监测。目前用于FSM的测量元件主要有:电涡流传感器、电容传感器、PSD和四象限探测器等。其中,电涡流传感器结构简单、灵敏度高、抗干扰能力强,但测量精度有限,无法实现FSM的高精度测量;电容传感器虽然测量精度高、响应速度快、探头体积小,但价格昂贵,并且存在严重的温度漂移现象,不适于温度变化较大的场合使用;PSD与四象限探测器类似,均通过监测反射光线间接实现反射镜位置的测量[6-10]。但由于探测器的分辨力有限,必须将探测器到反射镜的距离拉得足够远,才能实现较高的测量精度。因此,所占的空间较大,不利于FSM的小型化和集成化。为了实现机载小型化FSM的高精度测量及高低温适应性,研制专用的小体积、高精度微位移测量传感器非常必要。
微位移测量传感器,是一种集光、机、电为一体的数字化长度测量系统[11-15]。它以透射式计量光栅为测量基准,利用光电技术将位移信息转换为数字代码进行计数运算与软件细分,进而实现运动位移的高精度测量,具有响应速度快、分辨力高和抗干扰性能强等突出特点,广泛应用于现代精密测量与微机电系统等领域[16-20]。
2 微位移测量传感器的原理及设计要求
2.1 微位移测量传感器的技术原理
微位移测量传感器的结构组成如图1所示,其主体部分主要由直线精密滑轨、发光板、标尺光栅、指示光栅、接收板、传感器基座、测量探头和外壳体等8部分组成。其中,直线精密滑轨固连于传感器基座上,不仅实现了对导轨部分的刚性支撑,又实现了导轨相对于基座精确地往复运动;指示光栅通过光栅座固定于传感器基座上,标尺光栅直接固连在导轨上,因此标尺光栅即可在导轨的带动下相对于指示光栅进行直线往复移动,形成光栅运动副;测量探头位于导轨的另一端,因此探头与光栅运动副的位移量对应。发光板与接收板分别固连于光栅副的两侧,用于为测量提供光电信号。具体的工作过程为:首先,发光板上光源通电工作,光线经内置透镜准直后变为平行光;再经标尺光栅与指示光栅调制后形成与光栅栅距具有对应关系的莫尔条纹。然后,接收板上的光敏三极管接收到莫尔条纹信息后,输出4路初始相位依次相差π/2的模拟信号;最后,将光电流信号传送给处理电路进行计数与细分,完成数字化测量信息的输出。
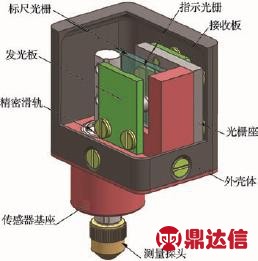
图1 微位移测量传感器的结构组成
Fig.1 Constitute structure of the displacement sensor
微位移测量传感器的工作原理如图2所示。由图可知:位移传感器最终的测量信息主要由原始码计数脉冲和细分码测量信息两部分组成,均来自于光敏三极管输出的光电流信号。其一,4路模拟信号经电阻放大与比较器整形后,依次转化为4路初始相位相差π/2的方波信号,再通过CPU进行计数累加及判向,最终获得光栅位移的原始码计数脉冲。其二,4路模拟信号两两组合后进行差分放大,获得两路高幅值、高可靠性的模拟信号,继而通过处理器集成的A/D转换模块完成向数字信号的转换,最终经软件细分后获得细分码信息。

图2 微位移测量传感器的工作原理
Fig.2 Principle diagram of the displacement sensor
2.2 微位移传感器的设计要求
在机载小型化FSM中,采用直线位移传感器对FSM的偏转角度进行间接测量,其测量原理如图3所示。
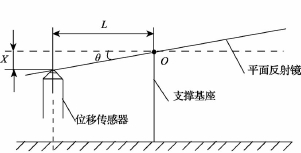
图3 机载小型化FSM角度测量原理示意图
Fig.3 Measure principle diagram for tilt angle of FSM
由图3可知,FSM系统中平面反射镜的偏转角度与位移传感器的位移量之间存在如下关系:
式中:θ为FSM中反射镜的偏转角度;X为位移传感器的位移量;L为位移传感器到回转中心的距离。
当θ非常小时:
由间接测量中的误差传播公式可得,FSM偏转角度的测量误差为:
式中:σθ为FSM偏转角度的测量误差;σX为位移传感器的测量误差;σL为位移传感器到回转中心距离的随机误差。
当FSM设计完成后,位移传感器到回转中心的距离随之确定,即L为定值,且σL=0,因此式(3)可转化为:
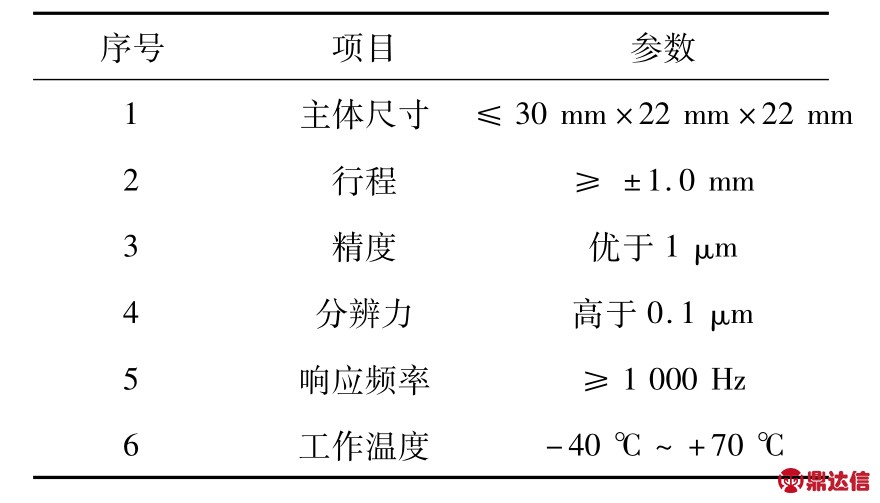
由式(4)可知:FSM偏转角度的测量误差大致与位移传感器的测量误差成正比,与位移传感器到回转中心的距离成反比。因此,为了提高FSM系统的测量精度,应在尽量拉大传感器到回转中心距离的同时,尽可能地提高位移传感器的测量精度。在机载小型化FSM的设计中,受机载狭小环境条件的制约,FSM的体积受到严格的限制,故通过增大传感器到达回转中心的距离来提高FSM偏转角度的测量精度,供献十分有限。因此,为了实现机载小型化FSM足够高的指向精度(优于4.0"),系统对位移传感器的工作性能提出了极高的要求,具体要求如表1所示。
表1 微位移测量传感器的主要设计指标
Table1 Performing requirements of displacement sensor
3 微位移传感器的设计实现
由表1可知:机载FSM不仅对微位移测量传感器的精度、分辨力、频响、高低温适应性等要求比较高,而且对外形尺寸的要求也异常苛刻。因此,该位移传感器最大的技术特点和难点就是:在一个极其狭小的空间体积内实现传感器的高精度、快速可靠测量。为了达到此目的,本研究分别从发光元件、光栅副滑轨、测量光栅和接收元件等关键技术进行分析与选择。
3.1 发光元件的选择
发光元件作为传感器的关键性器件之一,它的发光特性直接决定了莫尔条纹的质量,进而对传感器的测量性能造成影响。因此,传感器对发光元件具有如下要求:1)发射光束的波段越窄越好,且峰值波长与接收元件的响应波段相对应。尤其对栅距较小的光栅,发射光束的波段过宽,将严重降低莫尔条纹的对比度;2)发射光束越接近平行光越好,有利于保证各路信号相位的准确性;3)发光强度越高越好,有利于保证光电流信号的幅值,方便电路处理。
微位移测量传感器选用小体积的发光二极管作为发射光源,它的外形尺寸仅为Φ3 mm×3 mm,非常有利于传感器的小型化。而且该二极管的波段窄,光源通过自身封装的透镜实现平行光的输出,完全实现了1个发射光源为4个接收窗口提供照明的可能,进一步压缩了位移传感器的体积。此外,该发光元件良好的自准直性也使4路模拟信号的初始相位接近于理论设计值(依次相差π/2),避免了复杂的移相设计。
3.2 密珠滑轨的选择
小型精密滑轨主要用于实现光栅副的相对运动,即带动标尺光栅相对于指示光栅进行直线运动形成莫尔条纹,进而实现传感器的测量功能。图4为该微位移测量传感器所选用的小尺寸高精度密珠滑轨的组成结构图。如图所示,该滑轨副主要由导轨、导轨座、保持架和滚珠4部分组成。导轨与导轨座之间通过多排滚珠实现间接接触,从而将运动副的滑动摩擦转变为滚动摩擦,不仅有效减小了传感器测量过程中的摩擦阻力,而且有利于传感器响应速度及滑轨副使用寿命的提高。导轨、导轨座及滚珠之间以微小的过盈量(约0.5μm)装配而成,并在运动副的表面涂敷耐低温润滑脂,可靠保证了滑轨副的运动精度,即使面临较大的工作温差,也能实现滑轨副的无间隙运动。而且,导轨上均布有4条滑道专供密珠滚动,有效限制了导轨与导轨座之间的径向回转,可靠保证了导轨运动的重复精度。此外,通过在导轨的头部嵌入钢球的办法获得球型测量探头,不仅实现了位移传感器与被测面的点接触,而且便于传感器的初始位置调零。
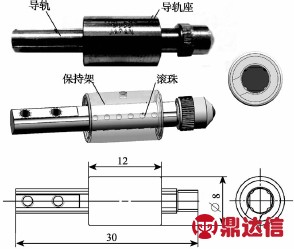
图4 小型密珠滑轨的组成结构图
Fig.4 Constitute structure of the small slide with plenty balls
3.3 测量光栅的设计
3.3.1 标尺光栅图案的设计
标尺光栅作为微位移测量传感器长度测量的基准,其栅距的大小一定程度上决定了位移传感器的分辨能力。图5为微位移测量传感器所采用标尺光栅的图案及其在玻璃上刻画后的实物照片。如图所示,该标尺光栅主要由通光窗口、增量式光栅和零位编码窗口3部分组成。其中,通光窗口用于保证测量绝对零点的低温可靠性;增量式光栅用于与指示光栅配合形成莫尔条纹并进行原始测量信号的提取与计数。在本位移传感器中,选择增量式光栅的光栅栅距为30μm,进行29份软件细分后,传感器的分辨力高达0.059μm;零位编码窗口用于为传感器的全行程测量提供绝对零点。

图5 标尺光栅的设计图案及实物照片
Fig.5 Pattern and photograph of scale gratings
3.3.2 指示光栅图案的设计
指示光栅与标尺光栅面对面相对运动,组成光栅副,用于读取标尺光栅上的位置信息,进而实现位移的精确测量。图6为微位移测量传感器所采用指示光栅的图案及其在玻璃上刻画后的实物照片。如图所示,该指示光栅主要由1个通光窗口、4个光栅窗口和1个零位编码窗口组成。其中,指示光栅的通光窗口与标尺光栅的通光窗口正对,指示光栅所提取的通光窗口信号作为比较电平对零位编码窗口所提取的零位信号进行鉴幅,以保证传感器测量零点的低温可靠性和抗干扰性;4个光栅窗口的刻线密度与标尺光栅相同,且4个窗口的光栅初始相位与标尺光栅依次相差0、π/2、π和3π/2,在工作过程中分别获得4路光栅测量信号,将其中互为反相的信号两两进行差分放大处理,最终得到2路稳定的正余弦信号,供下一步的原始脉冲计数及细分;指示光栅的零位编码图案与标尺光栅的零位编码图案完全相同,当二者完全重合时,传感器即获得位移测量的绝对零点。
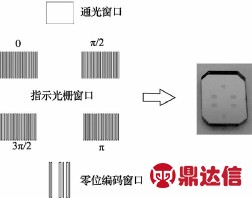
图6 指示光栅的设计图案及实物照片
Fig.6 Pattern and photograph of index gratings
3.3.3 零位编码窗口的设计
零位编码窗口分别存在于标尺光栅与指示光栅之上,用于为传感器的全行程测量提供绝对零点。为了适应处理电路的需求及保证零位信息的准确性,要求零位编码窗口的宽度与光电接收器的尺寸相当或接近。若零位编码窗口的宽度小于光电接收器的尺寸,零位编码窗口的光通量有限,不利于获得较强的零位信号;若零位编码窗口的宽度大于光电接收器的尺寸,零位信号的对比度不高,难以保证信号的提取质量。本设计采用光电接收元件的尺寸为0.60 mm×0.60 mm,因此,确定零位编码窗口的宽度约为23对线。然后,采用计算机仿真的办法对零位编码进行对比、分析和设计,获得零位编码的对比度和编码排布方式如图7所示。由图可知:当标尺光栅与指示光栅的零位编码窗口完全重合时,零位信号的主峰被加强,次峰被抑制,信号的对比度约为4∶1,满足处理电路对零位编码信号对比度的要求。
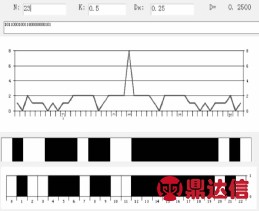
图7 零位编码的对比度及排布方式
Fig.7 Contrast and form of zero code
3.4 接收元件的选择
光电接收元件作为位移测量传感器的核心硬件之一,主要完成莫尔条纹光信号向电信号的转变,继而输入处理电路进行计数与细分,最终实现光栅移动位移的测量。传感器对接收元件有如下要求:1)较高的转换灵敏度,能够实现传感器足够高的响应频率;2较宽的波长响应范围,且峰值响应波长与发光元件相对应;3)较强的抗干扰能力,对外界噪声具有抑制作用;4)较小的外形尺寸,便于集成和实现传感器的小型化。
为了最大程度地压缩微传感器的体积,选用微型贴片式光敏三极管作为接收元件,它的外形尺寸仅为0.60 mm×0.60 mm,极易在电路板上集成。完成封装集成后整个接收板的尺寸不超过13 mm×10 mm。此外,该接收元件对信号具有放大作用,有利于高质量光电信号的提取。
3.5 测量传感器总成
图8为微位移测量传感器的组成零件和总装成品图。由图可知:该位移传感器选择将光电处理电路移出传感器主体,最大程度地压缩了传感器的主体尺寸,并且将4部分处理电路在一块电路板上集成,以便于与FSM的控制电路统一在伺服控制箱中打包。高精度密珠滑轨的采用,不仅大幅度减小了测量过程中的附加阻力,而且使光栅副的运动更加精准,保证了位移传感器测量时的重复精度;光栅副通光窗口的引入、独特零件编码的设计、裂相法信号提取方式的采用及低温润滑脂的使用,保证了位移传感器的高低温性能。在细分技术选择方面,放弃大体积的硬件细分方式,选择结构简单、可靠性高、经济性好的软件细分方式对传感器的光电信号进行细分,实现了传感器较高的测量分辨力。此外,在保证位移传感器最大尺寸不变的前提下(29 mm×20 mm×16 mm),设计了左、右手2种对称型结构,以适应机载FSM小型化的应用需求。完成精密加工、装调、检测后,微位移测量传感器的频响高达1 200 Hz,测量行程为±2.0mm,并且能在-40~+75℃的环境下正常工作,因此可知:所设计的微位移测量传感器具有体积小、行程大、响应快、高低温适应性强等突出优点,满足机载小型化FSM的应用需求。
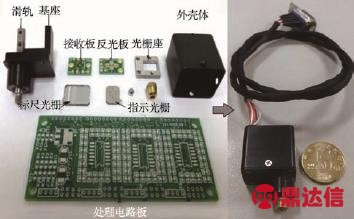
图8 微位移测量传感器的组成零件及总装成品图
Fig.8 Parts and assembly of displacement sensor
4 微位移测量传感器的应用及实验检测
4.1 微位移测量传感器在FSM中的应用方式
在机载小型化FSM中,采用X、Y轴对称线上均匀布置4个位移传感器的方式实现FSM两维角度信息的测量,具体排布方式如图9所示。
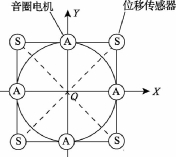
图9 微位移测量传感器在FSM中的位置排布
Fig.9 Position of displacement sensors in FSM
采用4个微位移测量传感器进行差分式测量的原理如图10所示。当反射镜绕Y轴回转时,首先将位移传感器S1、S2的测量结果取平均值,得到音圈电机M1的位移量;将位移传感器S3、S4的测量结果取平均值,得到音圈电机M2的位移量;再将音圈电机M1、M2的运动位移取平均值,即可得到反射镜绕Y轴回转的位移量,进而折算成角位移信息反馈给控制系统,实现FSM绕Y轴回转角度的闭环控制;同理,由位移传感器S1、S3、S2、S4的测量值经2次差分获得反射镜绕X轴偏转的位移量,进而折算成角位移信息反馈给控制系统,实现FSM绕X轴回转角度的闭环控制。
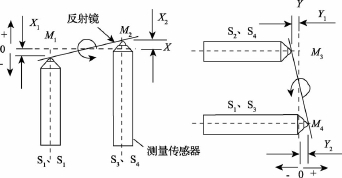
图10 4个位移传感器差分式测量的原理示意图
Fig.1 0 Measure principle of4 displacement sensors in FSM
若每个微位移测量传感器的单次测量误差为σ,则经二次差分后,测量结果的标准差为:
因此可知:这种差分式测量方法,不仅使FSM的结构更加紧凑,而且反射镜在每个方向上的角位移信息均由4个位移传感器的测量值通过2次差分间接获得,将FSM的测量精度提高1倍。
4.2 微位移传感器在FSM中的应用检测
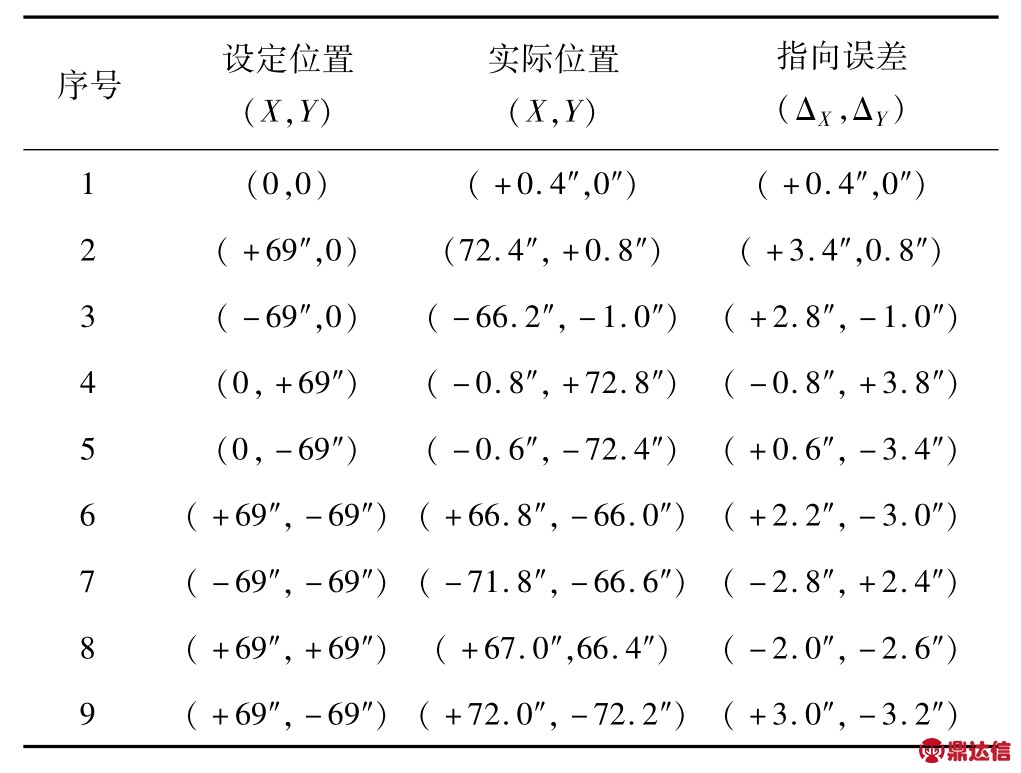
室温条件下,采用图11所示的实验装置对机载小型化FSM的指向精度进行了检测,进而验证微位移测量传感器的测量精度。具体的检测方法如下:首先由主控计算机和伺服控制箱将FSM装置控制在某个指定位置,待FSM工作稳定后,通过自准直仪测得FSM的实际位置,并与系统的设定位置进行对比分析,进而获得机载小型化FSM的指向精度。实验数据及分析结果如表2所示。分析结果显示:机载紧凑型FSM的指向误差方位不超过3.4"、俯仰不超过3.8",满足机载FSM的应用需求。同时也证明了:机载小型化FSM专用型微位移测量传感器具有精度高、响应快和分辨力高等技术特点,达到设计指标要求。
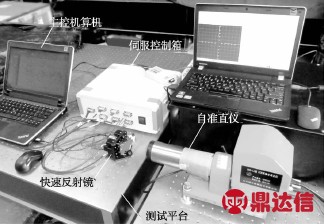
图11 微位移测量传感器应用效果的检测
Fig.1 1 Testing application impact of displacement sensors
表2 机载小型化FSM指向精度的检测结果
Table2 Measure results on pointing precision of FSM
5 结 论
为了实时监测机载小型化FSM中反射镜的位置,实现FSM系统偏转角度的闭环控制,本文针对机载FSM的应用需求,进行了专用型微位移测量传感器的研制。所设计的微位移测量传感器采用自准直光源、增量式光栅、贴片式光电三极管及软件细分等相结合的技术实现微位移的快速精确测量,是对光栅测长原理的一种小型化的全新尝试和应用。它的实际应用效果表明:该小尺寸位移传感器精度高、响应快和分辨力高,而且对高低温环境具有较强的适应性,满足机载小型化FSM的应用需求。同时,鉴于该微位移测量传感器小型化、高精度、高可靠性和低成本的技术特点,预计在相关的精密测量领域,尤其在空间严重受限的场合,具有良好的应用前景。


