
【摘要】本文所涉及的RV-4F-D工业机器人是一种用于冲压生产线的上下料机器人,该机器人通过一次拾取完成上料、下料动作。借助Pro/E软件的强大建模功能进行三维实体建模,然后通过Pro/E和Adams良好的数据共享能力,将模型数据保存为parasolid格式,导入Adams软件,根据实际运动情况添加相应约束。通过对机器人末端添加点驱动来实现机器人的轨迹规划,完成运动学仿真。通过测量各关节部件的位移、速度、加速度变化情况,观察各关节相关曲线的变化趋势,为冲压机器人轨迹优化及后续动力学仿真分析奠定基础。
关键字:冲压机器人;Adams;轨迹规划;运动仿真
1 引言
冲压加工生产中的手工送料由于存在着效率、速度、精度、安全等方面的一系列问题,已逐步由自动送料机构所取代,从而进一步满足了冲压生产自动化的要求,大幅度提高了生产节拍、生产质量等[1]。其中自动送料的关键设备为冲压机器人。
目前,大中型冲压件生产节拍12~25次/min,机械手定位精度±0.5mm,最高移动速度80m/min,除去压机冲压时间外,机器人的作业时间仅为1s左右,在如此短的时间内完成上下料动作,这就对冲压机器人的结构动态特性、材料摩擦性提出较高要求。
因此采用虚拟样机技术对冲压机器人进行运动学仿真,确定冲压机器人的运动轨迹的合理性,是后续准确研究冲压加工过程中机器人动力学特性的基础。
2 机器人工作场合及运动过程分析
传统靠单机人工操作进行的冲压加工,普遍存在劳动力密集、能耗高、车间占地面积大等难题,已经越来越不适应现代化、智能化生产的要求。而数控全自动冲压生产线具有高效率、高精度、高可靠性、智能化的优点。与单机生产相比,生产效率可提高1倍以上,车间面积减少50%,工人数量可减少80%,能耗降低30%以上。数控全自动冲压生产线的核心之一就是上下料机器人的应用。图1所示为冲压机器人在数控全自动冲压生产线中的应用。
上下料单元由两台压力机、一台冲压机器人、一副端拾器、一个气体压缩机构成。
上料运动过程分析如下:
(1)冲压机器人进模、取料、出模:机器人在待机位置。移动至冲压机床模具内(检测到模具已开模到位),再将手部端拾器缓慢下行一段距离,末端端拾器夹紧工件(检测夹紧信号),缓慢抬起,末端端拾器移出压力机,压力机接收工件出模信号。
(2)冲压机器人进模、放料、出模:机器人将夹有工件的末端执行器移动至下一压力机模具内(检测压力机为开模到位),机器人移动到模内设定位置,缓慢下行到设定点,末端端拾器松开工件,沿原路径返回待机位置,压力机接收信号,开始冲压工件。
3 仿真模型的建立[2~3]
将Pro/E环境下建好的机器人三维模型以Adams能较好识别的parasolid格式输出。三维模型导入Adams的具体步骤如下:
(1)在Pro/E中选择下拉菜单[文件]-[保存副本]命令,选择parasolid(*.x-t)格式,点击后出现保存副本对话框,然后输入新建名称,点击确定按钮。
(2)启动Adams软件,新建一个模型,名为MODEL-1,点击确定,进入工作界面。执行[File]-[import],在出现的导 File import窗口中,File Type选择为Parasolid选项,在File to read中选择上步中Proe保存的文件,点击OK,即将刚才从Proe中输出的模型成功导入Adams中,Adams环境下冲压机器人的仿真模型如图2所示。
至此仿真所需要的模型已初步完成,随后就是在Adams里面添加冲压机器人各部件运行所需的约束及驱动,完成运动学仿真。
4 仿真过程分析
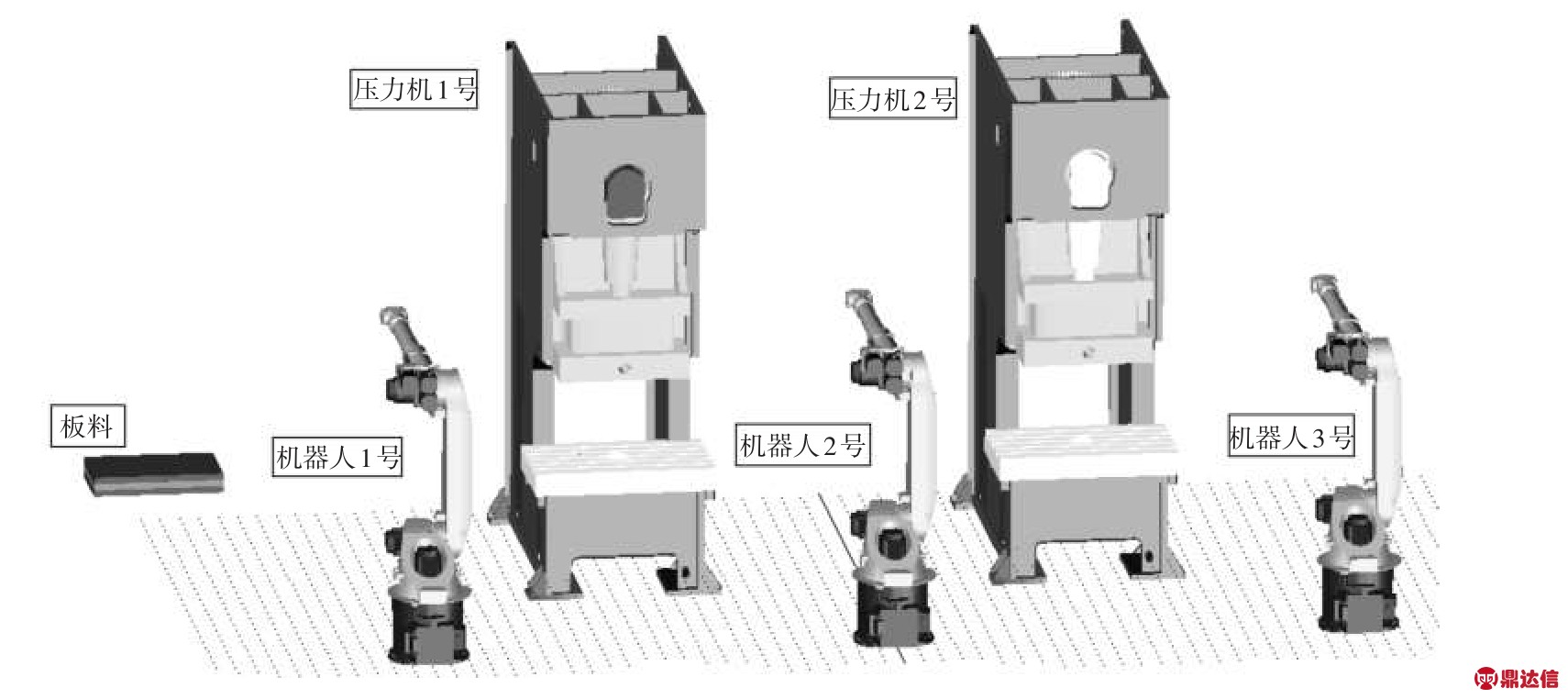
图1 数控全自动冲压生产线
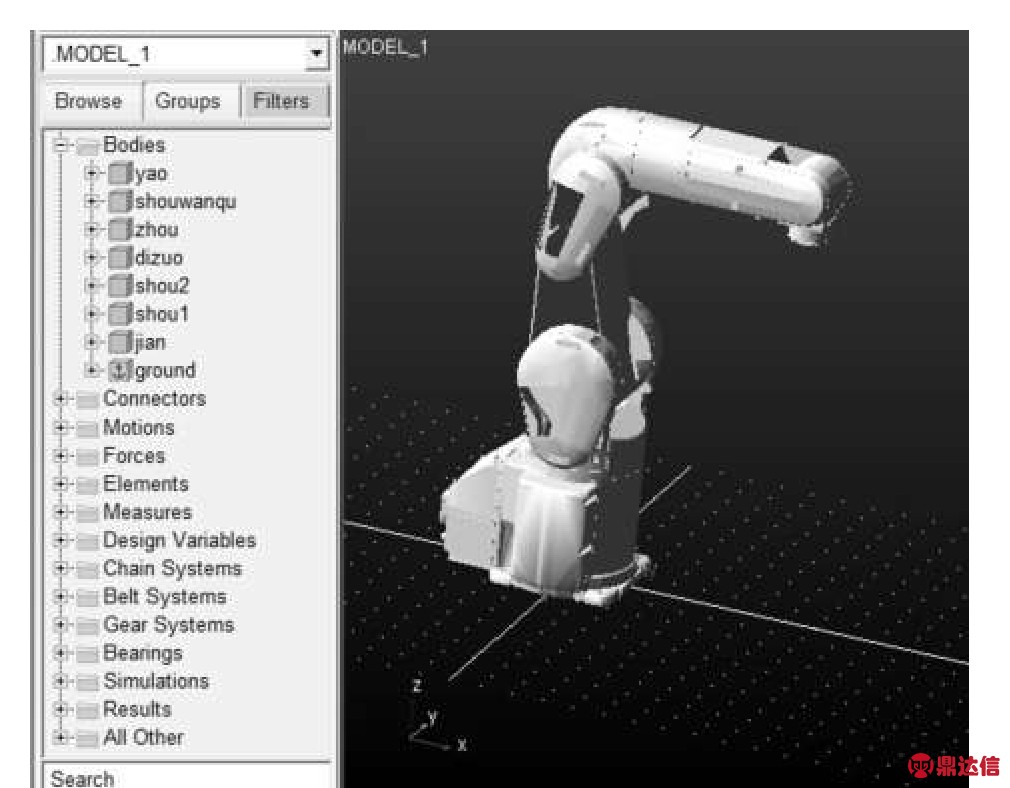
图2 RV-4F-D冲压机器人模型
冲压机器人在运动过程中要尽量平滑、平稳、准确定位,否则会使机械构件磨损加重、产生干涉碰撞,并导致冲压机器人本体的振动和冲击。因此为保证冲压机器人现实运行的平稳、安全,有必要在实际运行前采用虚拟样机技术对冲压机器人进行运动学仿真分析,检测各部件的位移、速度、加速度的变化情况,以便及时发现问题并及时改正。
将模型导入Adams软件后,各构件之间还没有任何约束,只是孤立的个体,需要在各构件间添加约束和驱动,将各零部件组合成整体。Adams/view提供了4种类型的约束:运动副约束、基本约束、运动约束和高副约束。
本文冲压机器人两两相邻的构件构成的6个关节都是转动关节,均定义为旋转副,底座与大地之间定义为固定副,如图3所示。然后为冲压机器人末端定义点驱动(general motions)完成冲压机器人的轨迹规划,如图3末端位置细实线所示。Adams轨迹规划的步骤如下:①将冲压机器人的末端参考点定义为点驱动,规划末端轨迹曲线;②仿真完成后保存后处理得到的各驱动关节的角度数据;③删除开始定义的点驱动,利用spline工具对曲线数据进行采集,作为各关节的驱动参数。
使用Math Function中的STEP函数可实现运动的分段控制,STEP函数的表达式为:STEP(x,x0,h0,x1,h1)。其中,x为自变量,可以是时间或自定义的变量;x0为自变量的初始值;h0为对应x0的变量值,变量值如果是角度,在值的后面加d表示单位度;x1为自变量的终值;h1为对应x1的变量值[4]。
根据冲压机器人末端需要完成的轨迹曲线设置点驱动各参数对应的运动方程如图4所示。
其中TraY对应的位置函数为:STEP(time,0,0,0.15,175)+STEP(time,0.45,0,0.5,30)+STEP(time,0.5,0,0.55,-30)+STEP(time,1.15,0,1.2,30)。
其中TraZ对应的位置函数为:STEP(time,0,0,0.15,0)+STEP(time,0.15,0,0.45,-250)+STEP(time,0.55,0,1.15,500)。
至此,建立完成了冲压机器人在Adams里面的轨迹规划仿真模型,然后进行1s,500步的仿真,结果如图3所示。
图3冲压机器人末端细实线为冲压机器人末端运动轨迹(依据现实冲压机器人搬运情况规划),各关节处方框为冲压机器人各关节约束副标志,末端箭头为点驱动标志。
在此在Adams后处理模块提取冲压机器人各个关节的角位移、角速度、角加速度曲线,如图5、图6、图7所示。
5 仿真结果分析
图5~图7为冲压机器人各个关节在Adams软件后处理模块下的仿真输出结果。通过观察各关节输出曲线,可知在给定冲压机器人运动轨迹的情况下,各关节的角位移和角速度曲线变化平稳,得出冲压机器人可以按给定轨迹运动,而角加速度曲线波动较大,是因为冲压机器人要在瞬间完成零件抓取,角速度在很短时间内从零加速到最大速度,所以加速度曲线波动较大是合理的。
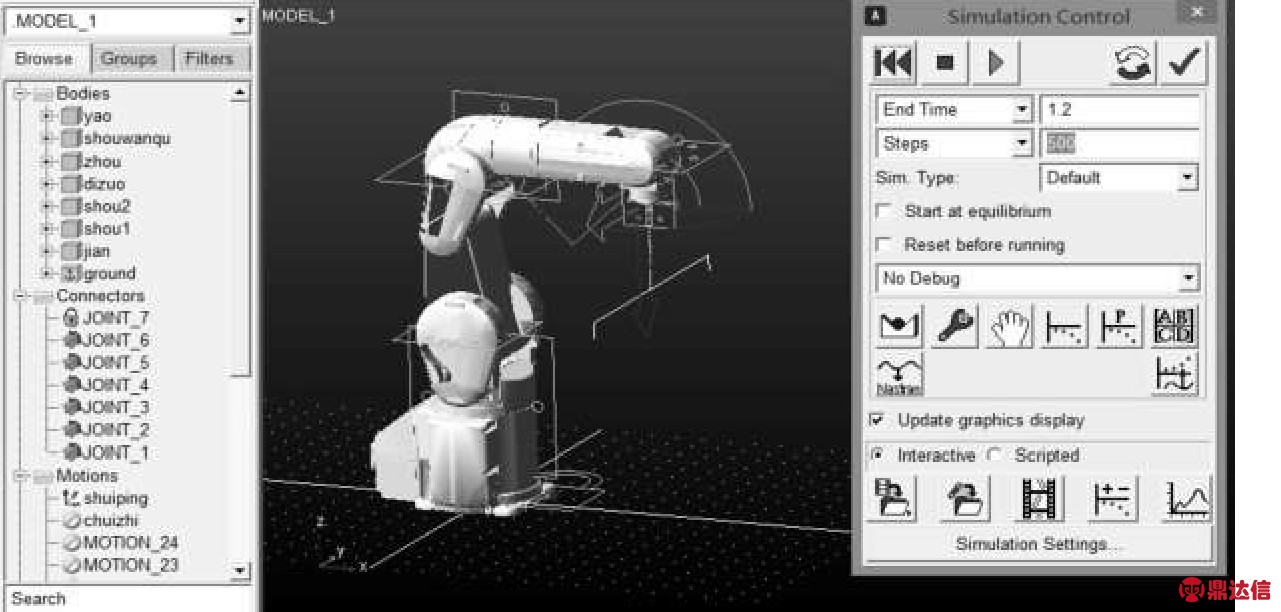
图3 冲压机器人仿真图
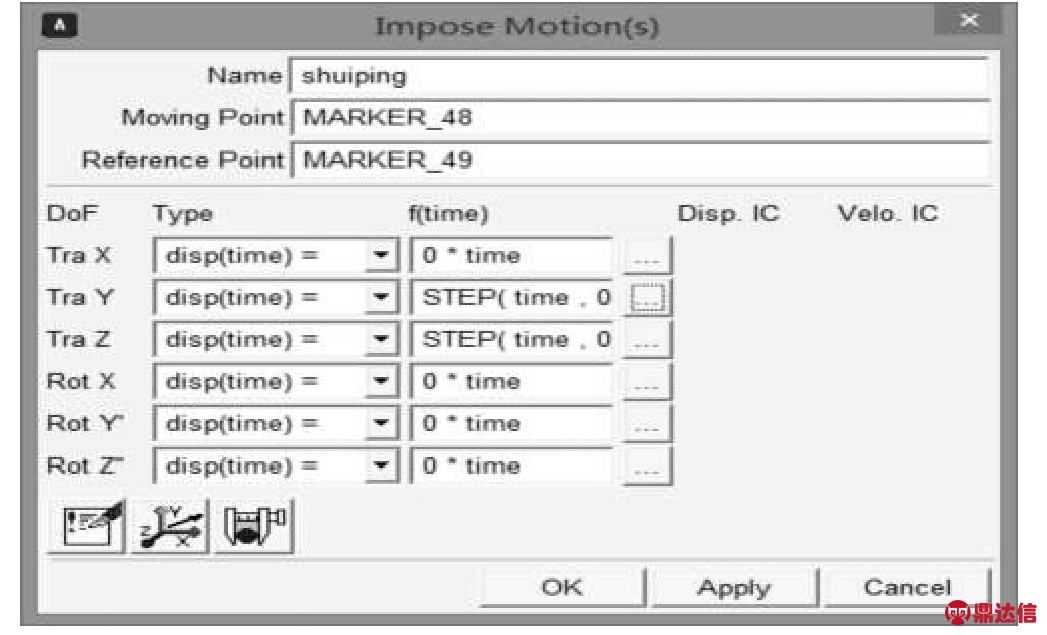
图4 点驱动参数设定
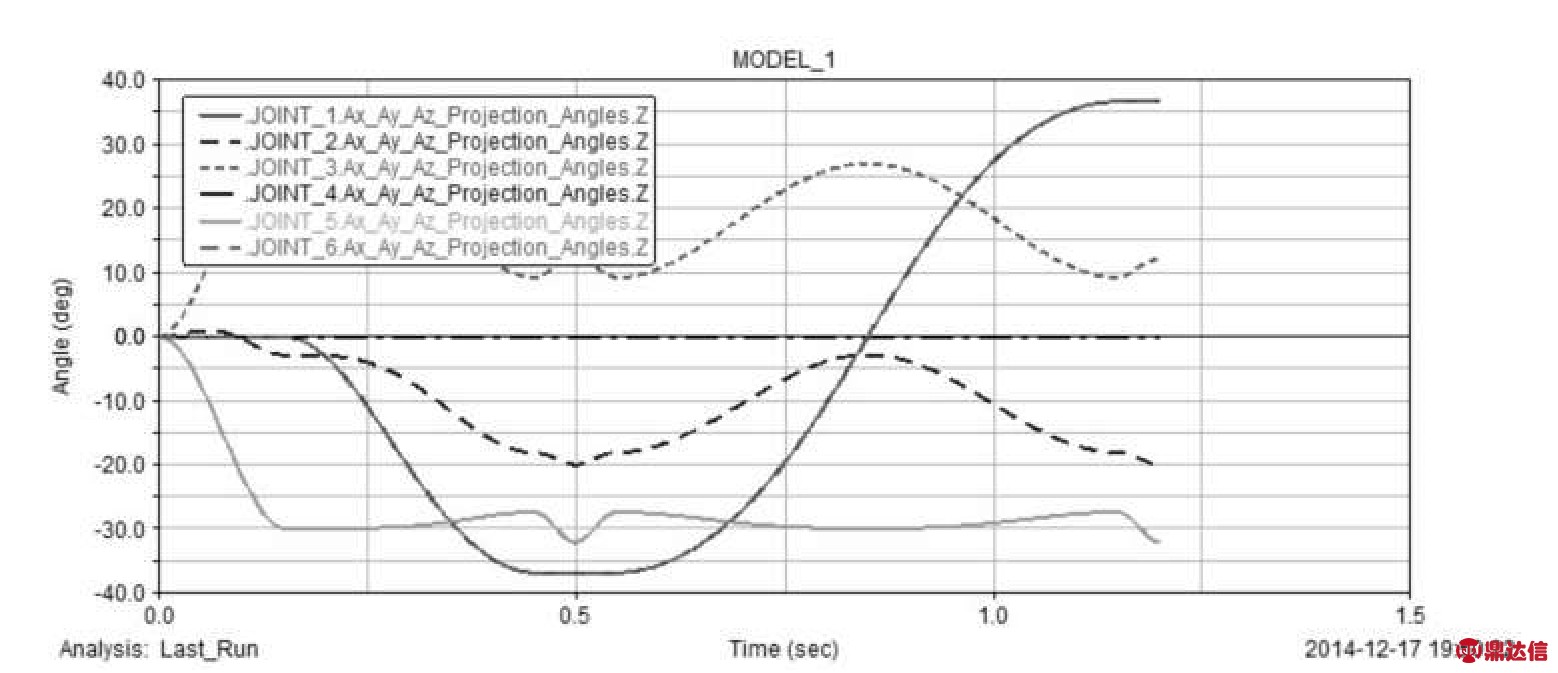
图5 各关节角位移变化曲线
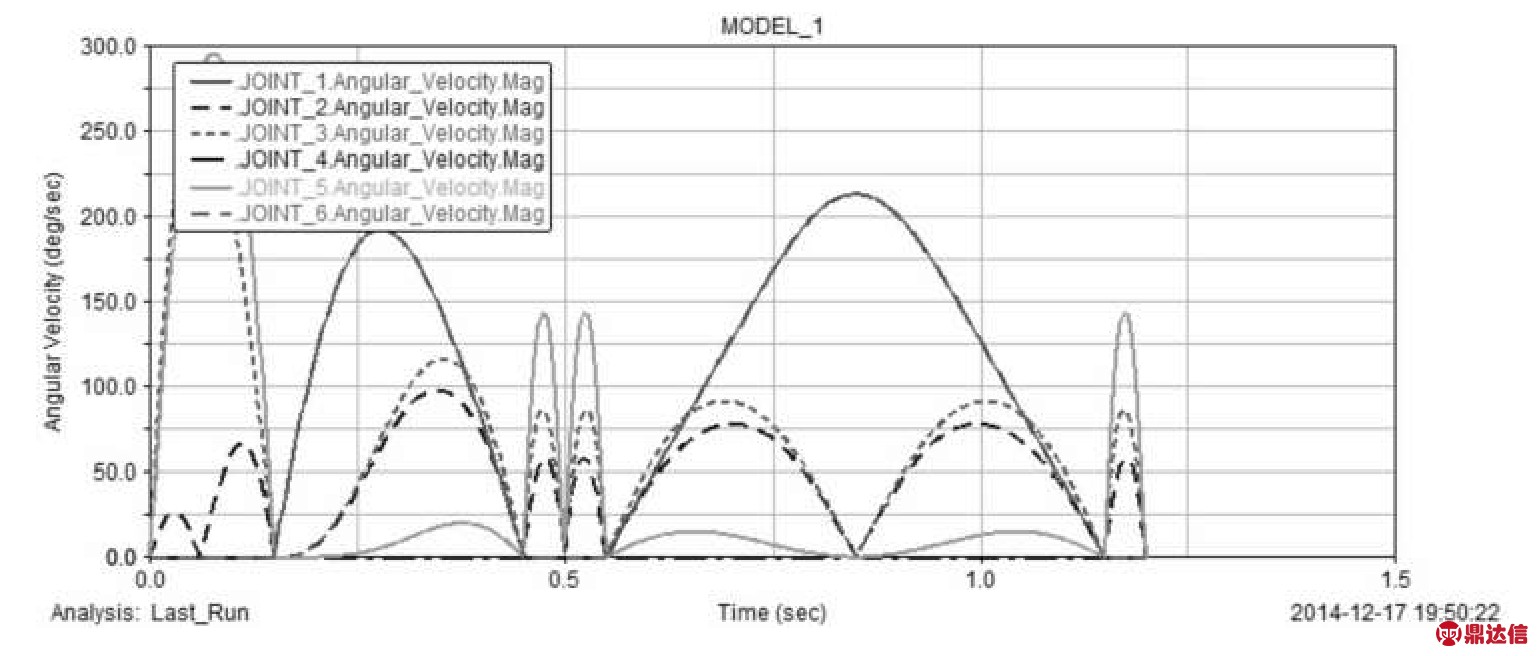
图6 各关节角速度变化曲线
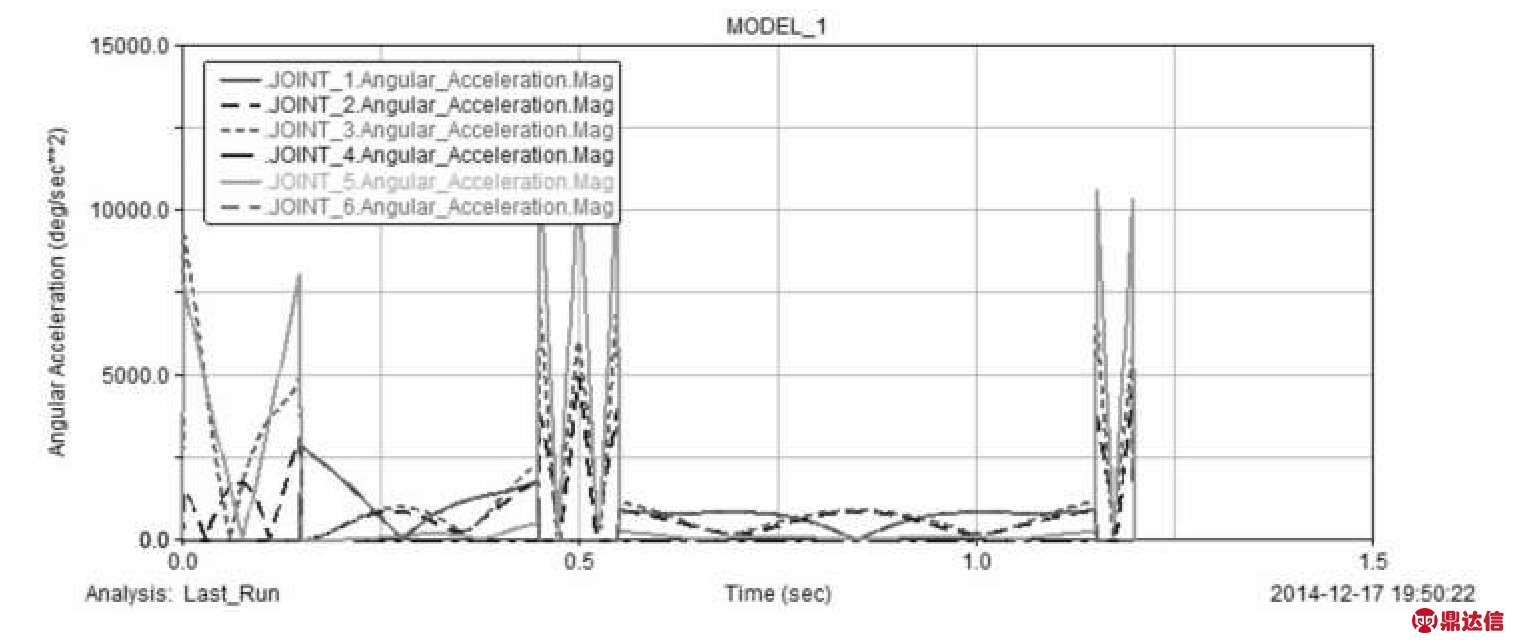
图7 各关节角加速度变化曲线
Adams后处理模块得到的角位移设定为弧度格式数据输出,利用spline工具对角位移数据进行采集,可以作为各关节的驱动参数,进行后续动力学分析。
6 结论
本文针对RV-4F-D型6自由度冲压机器人,利用Pro/E和Adams软件的联合优势,对6自由度冲压机器人的三维实体模型进行了运动仿真,主要完成以下研究工作:①三维模型建立,运动过程分析;②导入Adams,依据上述运动分析,添加约束和驱动;③通过末端实加点驱动,驱动参数运用Step函数对其进行定义,完成了上下料轨迹规划,解决了冲压机器人逆解求解难的问题,从而得到了与该轨迹对应的各个关节驱动参数[5];④通过直观的观察运动仿真及后处理模块的角位移、角速度、角加速度变化曲线,为后续动力学分析,及干涉检查提供依据。


